May 18, 2023
Bringing Far-Field Objects into Focus with Synthetic Data for Camera-Based AV Perception
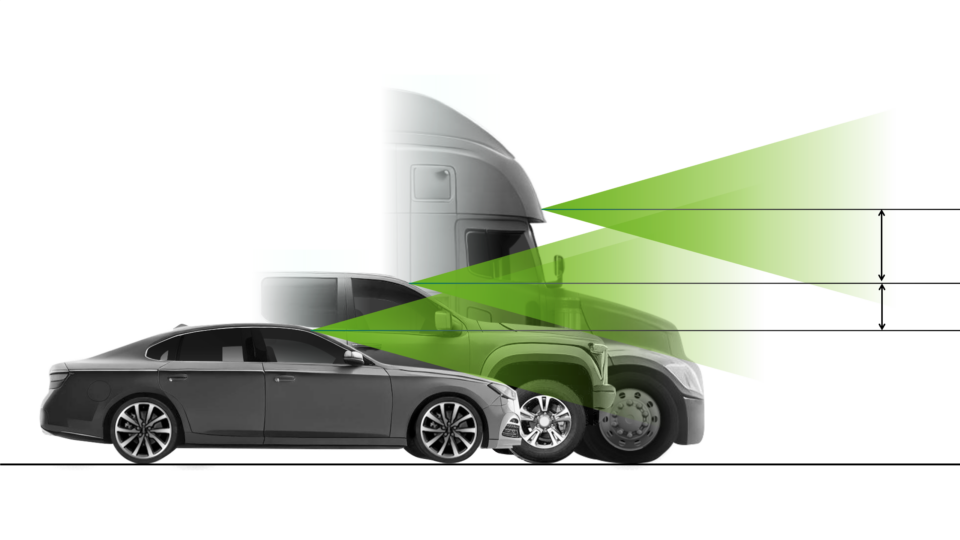
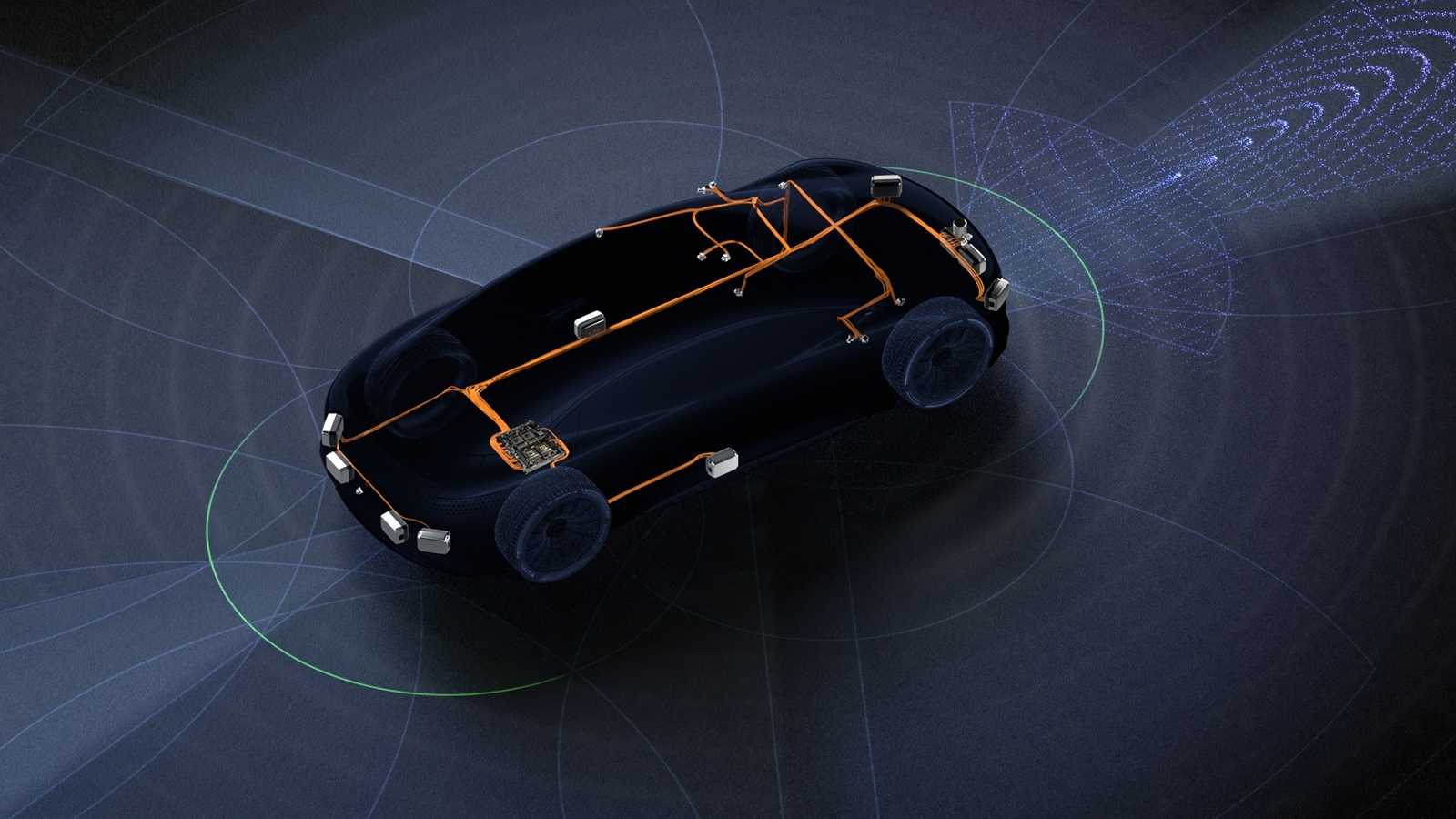
Detecting far-field objects, such as vehicles that are more than 100 m away, is fundamental for automated driving systems to maneuver safely while operating on...
7 MIN READ