NVIDIA Isaac Manipulator
NVIDIA Isaac? Manipulator, built on Isaac ROS, is a collection of NVIDIA? CUDA?-accelerated libraries, AI models, and reference workflows. It’s designed to help robotics software developers build AI-enabled robot arms—or manipulators—that can perceive, understand, and interact with their environments. This gives you a powerful tool for accelerating solutions for dynamic challenges such as machine tending, bin picking, inspection, and assembly tasks.
You can integrate any of the Isaac Manipulator libraries or foundation models into your software stacks, bringing accelerated performance and accuracy to your own platforms.
How NVIDIA Isaac Manipulator Works
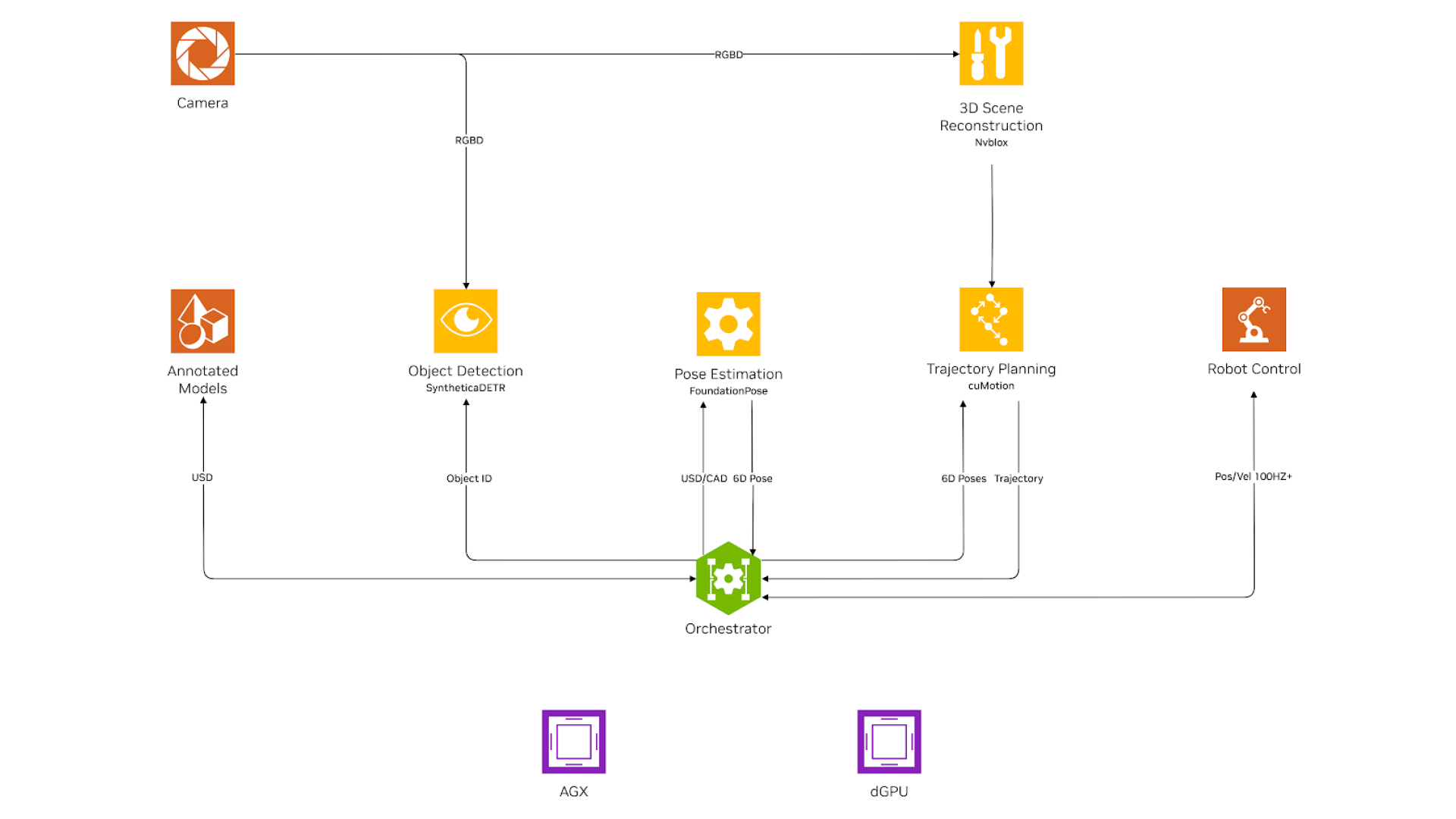
Isaac Manipulator is comprised of NVIDIA-accelerated libraries, AI models, and reference workflows for robot developers. The software uses NVIDIA cuMotion, a motion planner running multiple trajectory optimizations simultaneously to return the best solution. Isaac Manipulator also uses state-of-the-art foundation models for 6D pose estimation and tracking of novel objects, as well as object detection in indoor environments.
Quick Start Guide
Learn what you need to get started and how to set up using the Isaac ROS suite to tap into the power of NVIDIA acceleration on NVIDIA Jetson.
Beginner Workflows
Follow the tutorials to implement the fundamental robot arm task workflows.
What’s New
Learn how the latest Isaac ROS update enhances robot capabilities with advanced AI-based manipulation.
Real-World Use Cases
See how Isaac Manipulator’s integration with Miso’s Flippy improves performance, leading to faster task cycles and increased customer satisfaction.
Key Features
Isaac Manipulator brings new levels of dexterity and modular AI capabilities to robotic arms that face limitations in handling intricate tasks and dynamic environments due to their limited adaptability.
Highly Accurate and Performant Modules
Access a collection of advanced, modular packages that enable frictionless kinematics and AI perception for industrial robotic arms.
Accelerated Robot Motion Generation
NVIDIA cuMotion lets you implement custom algorithmic modules without a large pipeline overhead.
Faster Development Time
Speed up robotic task implementations with pretrained foundational models that can estimate and track poses of objects, predict ideal grasp points, run robotic arm trajectory optimizations, and more.
Open Ecosystem
Built on ROS
NVIDIA Isaac Manipulator is built on the open-source ROS 2 (Robot Operating System) software framework. This lets the millions of developers in the ROS community easily take advantage of NVIDIA-accelerated libraries and AI models to accelerate their AI robot development and deployment workflows.
Learn More About Isaac ROSROS is a trademark of Open Robotics

Motion Planning
NVIDIA cuMotion is an NVIDIA? CUDA?-accelerated library that helps solve robot motion planning problems at scale by running multiple trajectory optimizations simultaneously to return the best solution.
Read the Guide
Pose Estimation and Tracking
FoundationPose is a foundation model for 6D pose estimation and tracking of novel objects. It tracks and estimates the pose of unseen objects and can handle challenging object properties (textureless, glossy, tiny) and scenes with fast motion or severe occlusions.
Read the Guide
Object Detection
This pretrained model for object detection in indoor environments allows faster detection, rendering, and training of new objects. It can be used as a front end to pose estimators like FoundationPose, so it can localize objects using 2D bounding boxes before pose estimation.
Get Started With NVIDIA Isaac Manipulator
Download Code
To get started with the latest version of Isaac Manipulator, download the launch files from GitHub.
Start with Beginner Workflows
Follow the tutorials to implement the fundamental robot arm task workflows.
Build with Reference Architecture
This guide outlines Isaac Manipulator's key components and provides a tested architecture compatible with NVIDIA Jetson Orin?.
Test and Validate in Simulation
Virtually train, test, and validate robot manipulators using NVIDIA Isaac Sim and NVIDIA Isaac Lab.
Isaac Manipulator Learning Library
Flippy Meets NVIDIA Isaac ROS – Accelerated Motion Planning in Robotic Kitchen Assistants
Discover how integrating Isaac Manipulator enhanced robot performance, with faster motion planning cutting task cycle times, smoother trajectories boosting reliability, and overall increased customer satisfaction.
Ecosystem
Our industry partners are integrating NVIDIA Isaac Manipulator and accelerated computing into their platforms and solutions.