ROS? NVIDIA Isaac GEM? ROS2 ??????? ?? GPU ?? ???? ??? ??? ????? ???? DNN ?? ?? ??? ?????. ? ROS2 ???? ???? ????? ??? ??? ?? ?? ??(Long Stable Release)? ROS2 ??(Foxy)? ???? ????.
?? ?????? NVIDIA Isaac ROS GEM?? ?? ??? ???? ??? ?????. NVIDIA Jetson ???? ???? ?? ??? ?? ?? ?? ‘????(nanosaur)’? ??????(AprilTags) ??? ?? ?????.
?? ?? ROS? NVIDIA Isaac GEM? ??, ????? ????? ????? ?????.
ROS? ROS2? ??
2007?? ?? ???(Willow Garage)? ??????(Robot Operating System, ROS)? ??????. ? ?????? ??? ????? 2012??? ?? ????(Open Robotics) ??? ????. ???? ROS? ???? ?? ?????? ?? ?????, ?? ???? ???? ?? ? ?? ?? ??? ????? ???? ??? ?? ???.
2015?? ???? ROS ????? ??? ???? ?? ???? ????(roscore)? ????, ?? ??? ?? ? ???? ????? ???? ??????. ???? ???? ?? ??, ??? ??? ???? ?? ????? ????? ??? ??? 2?? ROS? ??? ????? ????.
ROS? ??? ?? ???? ? ???(Noetic) ???? ROS2? ???? ??? ??? ???? ???? ???, ??? LTS(Long Term Support, ?? ??) ??? ????? ???? ??? ?? ?? ???? ?????.
????
????(nanosaur)? NVIDIA Jetson? ???? ??? ??? ?? ?? ?????. 3D ??? ????, ?? ?? ????? ???? ? ???, ??? ???? OLED 2?? ??? ????. 10x12x6cm? ??? ??? ??? 500g? ?????.

????? ????? I2C OLED ????? 2?? ???? ??? I2C ?? ????? ???? NVIDIA JetBot? ?????. ??? ???? ?????? ??, ??(Docker)? ???? ROS2??? ????, ??? ??? ??? GPU? ????.
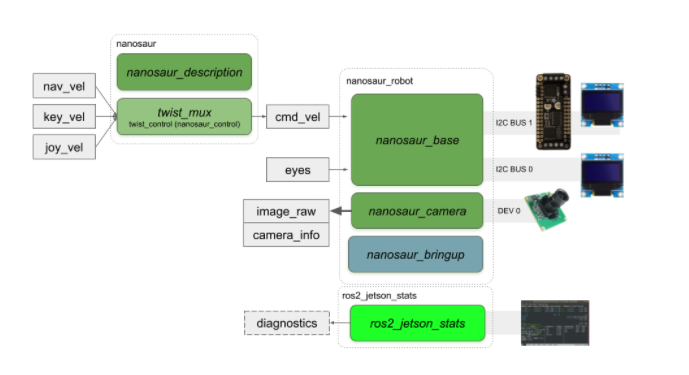
????? ??? ??? ?? ??? ?? ?? ??? ??? ????. ?? ?? ??? ????? ?????.
- nanosaur_base
- nanosaur_base? ?? ???? ?????? ??????.
- joy2eyes? ????? ???? ?? ?? ??(topic)?? ?????. ? ??? ? ??? ??? ?? ? ?????.
- nanosaur_camera
- nanosaur_camera? MIPI ???? ??? ????? ROS2 ???? ?????.
- ros2_jetson_stats
- ros2_jetson_stats? jetson-stats???? ??(wrapper)? NVIDIA Jetson(Xavier NX ?? Jetson AGX Xavier, Nano, TX1, TX2)? ????? ??? ?????.
? ??? ??? ???? ???(GitHub) ???? ?????.
???? ?? ? ???? ROS2 ???(graph)? ??? ????.
????? NVIDIA Jetson ROS Foxy Docker ???? ?? ???? ??????. ????(PyTorch)? NVIDIA TensorRT, DeepStream SDK ?? AI ?????? ??? ROS2 ???(Galactic), ????(Eloquent), ???(Melodic), ???? ?????.
ROS2 ??? jetson ????? ?? nanosaur_camera?? ????/???? ??? ???? ??? ????.
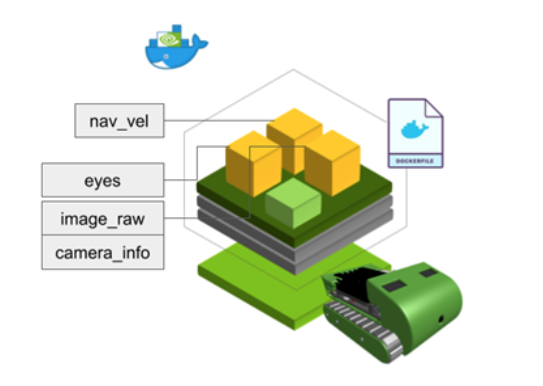
????? ?? ? ??? ? ?? ??? ???? ????. ?? ? ??? image_raw topic? ?????? ?? ??? ?? ????, ????? ??? ??? ?????.
ROS? NVIDIA Isaac GEM
??? ??? ROS2 ???? ???? GPU ?? ???? ??? ??????. ???? ????? ?? ??? ???? CPU ??? ???? ??, AI? ???? ??? GPU??? ?? ??? ??? ??? ????. ? GEM ??? ROS ????? ???? NVIDIA Jetson? ?????.
NVIDIA Isaac GEM? ROS ????? ???? ?? ???? ??? ????, ROS2 ???? ? ??? ?? ROS?? ??? ???? ?? ??? ??????. ROS? NVIDIA Isaac GEM? x86_ 64/dGPU(Ubuntu 20.04)? Jetson Xavier NX/AGX Xavier??? ?? NVIDIA JetPack 4.6? ?? ?????.
ROS? NVIDIA Isaac GEM?? ??? ?????.
- isaac_ros_common
- isaac_ros_image_pipeline
- isaac_ros_apriltag
- isaac_ros_dnn_inference(??)
- isaac_ros_visual_odometry(??)
- isaac_ros_argus_camera(??)
??????
??????(AprilTag)? ???? ??? ???? ??? ??? ???? ??? QR ?????. ? ???? ?? ??? ???(fiducial), ?? ??? ?? ??? ??? ????? ??? ???? ?? ???? ????. ?? ?? ???? ???? ???(visor)? ????? ????? ???. ??? ???? ???? ??? ?? ??? ??? ???? ???? ???? ??? ?????.
ROS2 ?????? ???? NVIDIA GPU? ??? ? ??? ????, ??(pose)? ID? ??? ?????? ?????. ? ???? CPU ?????? ??? ROS2 ??? ?????.
??? ???(dependencies)? ??? ????.
- isaac_ros_common
- isaac_ros_image_pipeline
- image_common
- vision_cv
- OpenCV 4.5+
???? ????? ????? ???? ROS2 ???? ?????? ????? ??, ???? ? ????.
????? ?????? ??? ???? ???? ???? ??? ????? ?????. ?? ? ?? ??? ?????. ?, ???? ? ?? ??? ???? ??, ?? ???? ??? ??????(calibration)? ?? ???? ??? camera_info ??? ????? ???.
? ??? ?? ? ros_image_proc? ?? ???? ROS2 ??????? ???? ??? ??? ?????. ?? ??????? ???? ?? ??(pose estimation) ??? ?????.

?? 7. ?? ???? ?? ??? ??
isaac_ros_apriltag? ????? ??? ???????? ??? ROS2 ?????. ??? ???? ?? ??? ???? ??????. ???? ???? ??? ??, ??? ??, ID, ?? ?? ????. ? ??? ?? ??? /tag_detections???. ??? tag_detections ???? ?????.
--- header: stamp: sec: 1631573373 nanosec: 24552192 frame_id: camera_color_optical_frame detections: - family: 36h11 id: 0 center: x: 779.4064331054688 y: 789.7901000976562 z: 0.0 corners: - x: 614.0 y: 592.0 z: 0.0 - x: 971.0 y: 628.0 z: 0.0 - x: 946.0 y: 989.0 z: 0.0 - x: 566.0 y: 970.0 z: 0.0 pose: header: stamp: sec: 0 nanosec: 0 frame_id: '' pose: pose: position: x: -0.08404197543859482 y: 0.11455488204956055 z: 0.6107800006866455 orientation: x: -0.10551299154758453 y: -0.10030339658260345 z: 0.04563025385141373 w: 0.9882935285568237 covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0] ---
????? ?????? ??
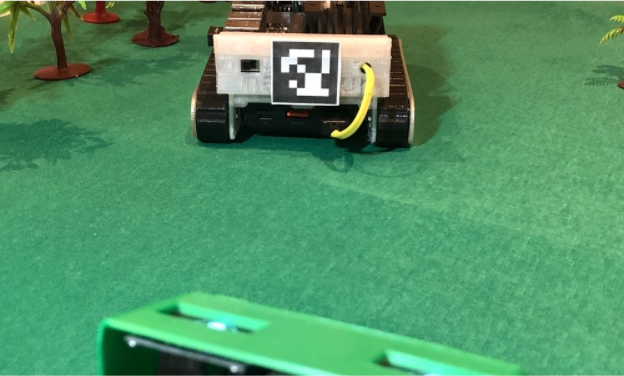
nanosaur_follower ??? ????? ?? ?? ??? ?? PID ??(gain), ??? ?? ?????? ID? ??? ?????? ???? ????. ?? ??(loop)?? ? ??? Isaac_ros_apriltag? ??? ???? ?????, ??? ??? ???? ???? ?? ?? ?? ??? ?? ??? ?????.
?? 8? ? ????? Isaac_ros_apriltag? ?? ??? ??? ??? ???? ???? nanosaur_follower ??? ??? ?????.
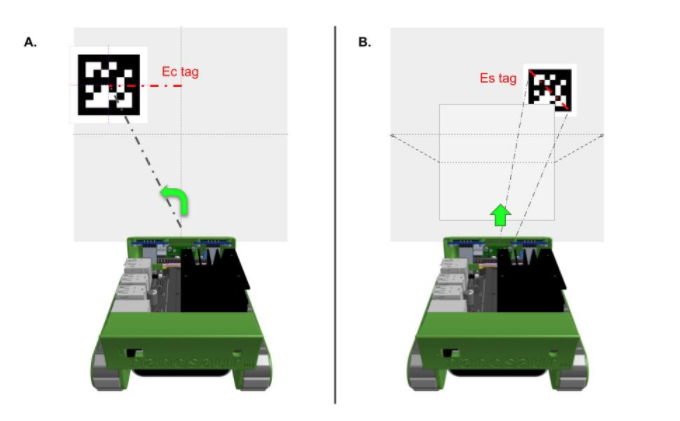
???? ??? ??? ?? ?? ??? ?? ??? ??? ??, ??? PID ???? ??? ??? ?? ?????. ?? 9?? 1? ???(A)? ???? ?? ??????? ???? ??????? ??? 0?? ????. ? ??? ROS2? ?? ?? ???? ??. ??? ??? ????(distance)?? ??? ? ?? ??? ??? ??(B)? ?????.
??? ? ?????
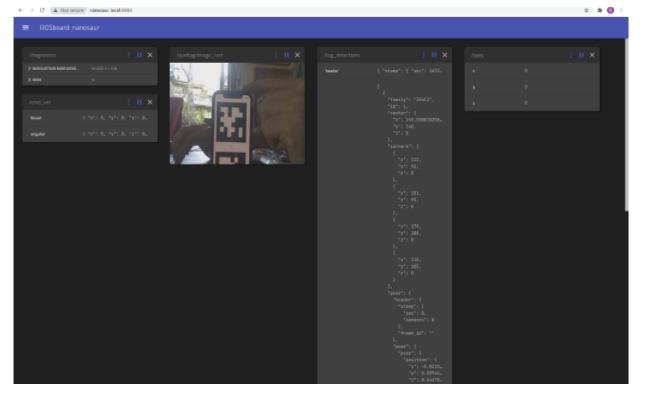
????? ?? ??? ??? ???? ????? ??? ? ?? ?? ???? ?? ?????. ??? ??? ??? ? ?? ?? ????? ????? ??? ? ??. ?? 10? ??? ?????? ????.
??
?? ?????? NVIDIA Isaac ROS GEM?? ?? ??? ???? ??? ??????. ? ???? NVIDIA Jetson ??? ??? ??? ?? ?? ??? ????? ?????? ??? ???? ?? ????.
? ??? ??? ?? ???? Isaac ROS ???? ??(Isaac ROS nanosaur integration)? ???????.