??? ??? ??? ??, ???? ?? ??? ???? ? ??? ??? ???? ?? ??? ??? ?? ??? ? ?? ?????. ?? AI? ???? ?? ??? ? ? ???? ??? ??? ???? ???? ??? ?? ? ?? ?? ? ???? ??? ?? ? ????.
?? ?? ???? ???? ? ??? ?? ??? ??? ? ???? ????? ??? ????. ? ??? ??? ?? ??? ????, ?? ?? ?? ?? ???? ???? ???, ??? ??? ?? ?? ???? ?? “??”?? ??? ??? ???.
???? ??? ?????. ?? ??? ? ???? ????? ?????? ???? AI ??? ?? ???? ??????? ???? ????. ?? ???? ??? ?? ??? ???? ???? ??????? ??? ? ?? ?? ??? AI ??? ???? ???. ?? ????? ?? ???? ??????? ???? ? ?? ?? ??? ?????.
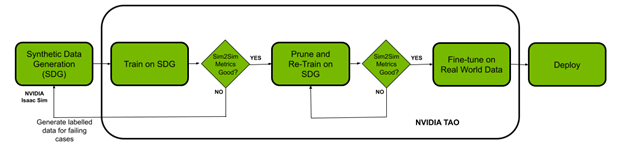
? ?????? NVIDIA Isaac ??? ? TAO ?????? ?? ??? ??? ?? ?? ??? ?? ??? ? ?? ??? ????? ???. ?? ??? ??? ?? ???? ???? ?? ???? ????? ??????? NVIDIA Isaac Sim? ?????. NVIDIA TAO Toolkit? ???? ????? ???? ?? ?? ???? ???? ?? ????? ??? ?? ???? Transfer Learning ??? ??? ?? ?? AI ?? ?? ??????. ??? NVIDIA Isaac ROS? ???? ???? ??? ??? ???? ?? ??? ?????.
?? ??
???? ?? ???? ? ??? ?? ??? ?? ???? ??? ???.
- NVIDIA GPU ???? ??: >470
- NVIDIA Docker: 2.5.0-1
- ???? ?? ?????? NVIDIA GPU:
- NVIDIA A100
- NVIDIA V100
- NVIDIA T4
- NVIDIA RTX 30×0 (NVIDIA Isaac Sim? NVIDIA RTX 20 ???? ??)
- NVIDIA Jetson Xavier ?? Jetson Xavier NX
- NVIDIA TAO Toolkit: 4.22. ??? ??? TAO Toolkit ?? ?? ???? ?????
- NVIDIA Isaac Sim ? Isaac ROS
NVIDIA Isaac Sim? ?? ?? ??? ??
? ????? NVIDIA Isaac Sim?? ?? ???? ???? ??? ???? ?????. ?? ???? ??? ????? ?? ????? ???? ??? ??? ?????. ?? ???? ?? ???? ????? ???? ??? ?? ?? ??? ??? ??? ???? ? ??? ? ? ????.
NVIDIA Isaac Sim? ?? ???? ???? ??? ? ?? ??? ?????.
- Replicator composer
- Python scripts
- GUI
? ????? Python ????? ???? ??? ????? ???? ????? ????. ??? ????? ?? ? ??? ??? ??? ???, ?????? ??? ??, ??? ?? ? ??? ? ????? ???? ??? ??? ???? ????? ??? ???.
?? ??? ??? ?????? ??? ????? ?? ??? ????? ???? ????? ??? ????, ?? ???? ? ? ?? ??? ??? ????? ???? ??? ??? ?????.
? ??, ??? ?? ???? ? ?? ??? ???? ???? ????? ? ????. ?? ???? ?? ??? ??? ??? ??? ???? ??? ?????. NVIDIA Isaac Sim? ?? ??? ?????, ???? YCB ?????? ???? ???? ?????.
NVIDIA Isaac Sim? ???? ?? Isaac Sim ? ???? python.sh ????? ??? ???? ?? ??? ?????. ? ??? ??? ??? ?? ????? ???? ? ?????.
??? ??? ?? ???? ?????.
??? ???? ?? ??? ???? ?????.
def add_camera_to_viewport(self):
# Add a camera to the scene and attach it to the viewport
self.camera_rig = UsdGeom.Xformable(create_prim("/Root/CameraRig", "Xform"))
self.camera = create_prim("/Root/CameraRig/Camera", "Camera")
Semantic ID? ??? ??
def add_floor_semantics(self):
# Get the floor from the stage and update its semantics
stage = kit.context.get_stage()
floor_prim = stage.GetPrimAtPath("/Root/Towel_Room01_floor_bottom_218")
add_update_semantics(floor_prim, "floor")
?? ??? ????? ???? ??? ??:
def load_single_asset(self, object_transform_path, object_path, usd_object):
# Random x, y points for the position of the USD object
translate_x , translate_y = 150 * random.random(), 150 * random.random()
# Load the USD Object
try:
asset = create_prim(object_transform_path, "Xform",
position=np.array([150 + translate_x, 175 + translate_y, -55]),
orientation=euler_angles_to_quat(np.array([0, 0.0, 0]),
usd_path=object_path)
# Set the object with correct physics
utils.setRigidBody(asset, "convexHull", False)
??? ???? ?? ??? ???:
def create_camera_randomization(self):
# A range of values to move and rotate the camera
camera_tranlsate_min_range, camera_translate_max_range = (100, 100, -58),
(220, 220, -52)
camera_rotate_min_range, camera_rotate_max_range = (80, 0, 0), (85, 0 ,360)
# Create a Transformation DR Component for the Camera
self.camera_transform = self.dr.commands.CreateTransformComponentCommand(
prim_paths=[self.camera.GetPath()],
translate_min_range=camera_tranlsate_min_range,
translate_max_range=camera_translate_max_range,
rotate_min_range=camera_rotate_min_range,
rotate_max_range=camera_rotate_max_range,
duration=0,5).do()
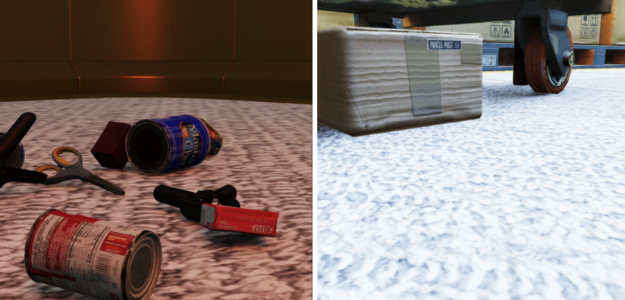
?????? ??? ??? ??? ?? ??? ???? ?????. ??? ?? ?? ?? ???? ????? ?? ID? ??? ???? ???. ?? ????? ?? ??? sim2real ??? ???? ?? ??? ????? ???????.
NVIDIA Isaac Sim ??? ??? ???? ??? ?? ??? ????? ??????. ? ?? ???? ??? ??? ????? ???? ??? ????, ??? ????? ??????, ??? ??? ???? ?? ?? ??? ???????. NVIDIA? ?????? ?? ?? ???? ???? ? 3? ?? ???? ??????.
TAO Toolkit?? ????, ?? ? ???
? ????? TAO Toolkit? ???? ?? ??? ??? ?? ???? ?? ?????. ? ??? ?? NGC?? ???? UNET ??? ??? ????? ????.
!ngc registry model list nvidia/tao/pretrained_semantic_segmentation:*
??? ?? ???, ?? ??(TAO ??) ? ?? ????? ?????.
%set_env KEY=tlt_encode %set_env GPU_INDEX=0 %set_env USER_EXPERIMENT_DIR=/workspace/experiments %set_env DATA_DOWNLOAD_DIR=/workspace/freespace_data %set_env SPECS_DIR=/workspace/specs
The next step is to pick the model.
?? ????? ??? ?????.
???? ?? ????? ?? ??
?? ????? AI ? ? ?? ??? ?? ?????? ?? ?????? ???? ???? ?? ??? ?????. ???? ????? ???? ?? ?? ???? ??? Transfer Learning? ???? ?? ????? ??? ?? ??? ?? ??? ? ????.
?? ????? ?? ???? ??, ???, ?? ??? ?? ?? ??? ???? ???? ????.
?? ResNet10 ? ResNet18 ??? ?? U-Net ??? ??????. ???? ?? ??? ?? ??? ? ?? ?? ???? ??, ?? ????? ?? ???? ??? ?? ???????. ????? ????? ??? ??? ?? ??? ???? ????? ???? ?? ???????.
| BackBone | Pruned | Dataset Size | Image Size | Training Evaluations | ||||
| Train | Val | F1 Score | mIoU (%) | Epochs | ||||
| RN10 | NO | 25K | 4.5K | 512×512 | 89.2 | 80.1 | 50 | |
| RN18 | NO | 25K | 4.5K | 512×512 | 91.1 | 83.0 | 50 |
? 1. TAO? NGC ????? ?? ??? ?? ?? ?? ????? ??? ?? ??.
????(FPS)? ???? ??? ???? ?? ??? ??? ??? ??? ??????. ?? ??? ?? ??? ????(UNET) ??? ????.

?? ??? ??? ? ?, ?? ??? ? ??? ?? ??? ????? ?? ??????. ??? NGC ?????? ?? ??? PeopleSemSeg ??? ??????. ? ??? ??? ??, ?? ?? ? ?? ??(FOV)? ???? ??? ?????? ?? “??” ???? ?? 500? ?? ??? ?? ?? ?????????. ? ??? ??? ?? ??? ? ?? ?? ???? ??? ?? ????.
??? ?????? ? ??? ????? ? ?? IOU? 10% ?? ????? ? ?? ??? ???? ??? ? ?? ? ?? ??? ???? ?????.
| BackBone | Pruned | Dataset Size | Image Size | Training Evaluations | |||
| Train | Val | F1 Score | mIoU (%) | Epochs | |||
| PeopleSemSegNet | NO | 25K | 4.5K | 512×512 | 98.1 | 96.4 | 50 |
| PeopleSemSegNet | NO | 25K | 4.5K | 960×544 | 99.0 | 98.1 | 50 |
? 2. ???? ??? PeopleSemSegNet ??? ??? ??
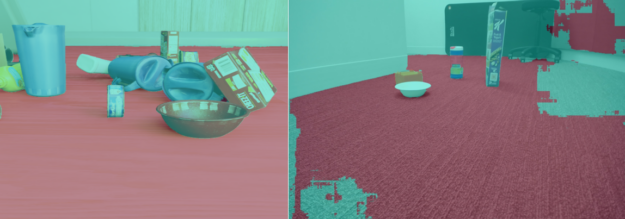
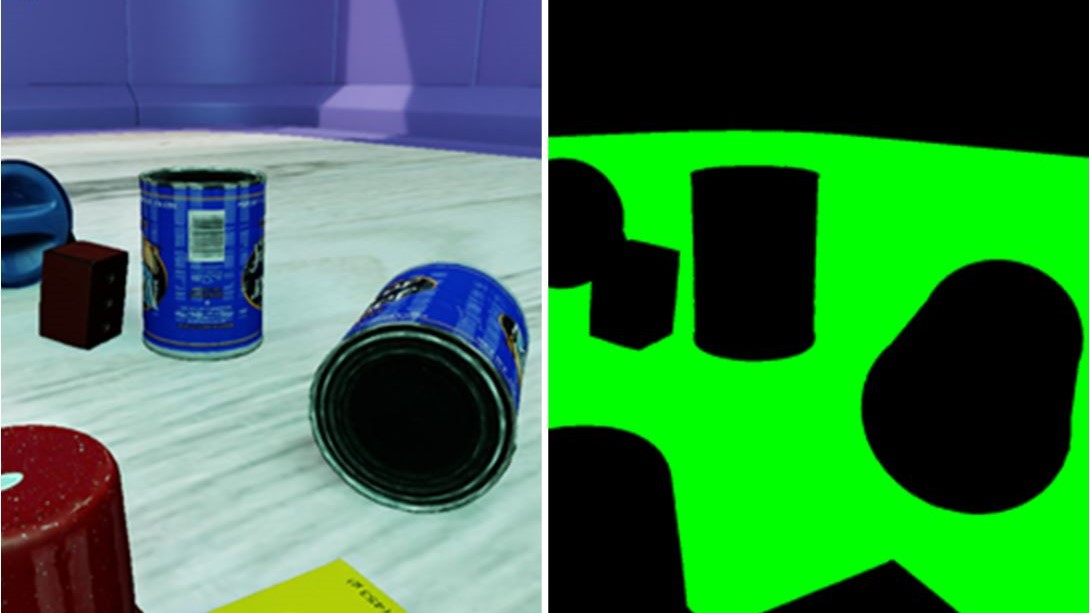
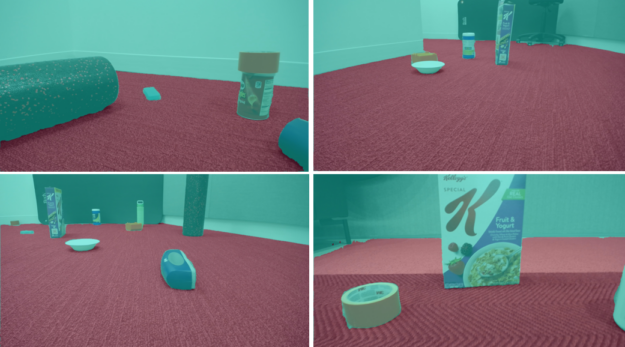
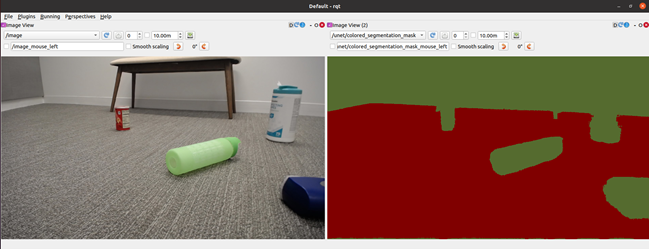
?? 4? ?? ???? PeopleSemSeg ??? ?? ???? ?, ?? ????? ????? ???? ?? ???? ?? ?? ??? ?????. ?, ??? NVIDIA Isaac Sim ???? ?? ????? ??? ??? ?????.
?? ??? ? ??? ??? ? ?? ?? ????? ??? ?? ? ??? ?? ??????? ?? ??? ??? ???? ?? ????? ????. ???? TAO? ?? ?? ??? ?????.
!tao unet train --gpus=1 --gpu_index=$GPU_INDEX \
-e $SPECS_DIR/spec_vanilla_unet.txt \
-r $USER_EXPERIMENT_DIR/semseg_experiment_unpruned \
-m $USER_EXPERIMENT_DIR/peoplesemsegnet.tlt \
-n model_freespace \
-k $KEY
??? ????? ? ?? ???? ?? ?? ??? ?????.
!tao unet evaluate --gpu_index=$GPU_INDEX -e$SPECS_DIR/spec_vanilla_unet.txt \
-m $USER_EXPERIMENT_DIR/semseg_experiment_unpruned/weights/model_freespace.tlt \
-o $USER_EXPERIMENT_DIR/semseg_experiment_unpruned/ \
-k $KEY
NVIDIA Isaac Sim ???? ?? ?? ??? Sim2Sim ?? ??? ?????? ?? ??? ?????.
?? ????? ? ??? ????? ?? GPU?? ????? ??? ??????. ??? ??? ???? ???? ?? ? ??? ????.
- ??(Pruning): TAO Toolkit? ?? ??? ?? ?? ???? ??? ???? ???? ??? ??? ????? ?????. ?? ?? ??? ???? ????? ??? ?? ?????? ???.
- ???? ? ???: TAO Toolkit? ? ?? ??? ??? ? ??? ???? ?? ??? ? ?? ? ????. ??? ?? FP32?? INT8? ???? ???? ???? ????? ?? ??? ?? ? ????.
?? ??? ??(prune)???.
!tao unet prune \
-e $SPECS_DIR/spec_vanilla_unet.txt \
-m $USER_EXPERIMENT_DIR/semseg_experiment_unpruned/weights/model_freespace.tlt \
-o $USER_EXPERIMENT_DIR/unet_experiment_pruned/model_unet_pruned.tlt \
-eq union \
-pth 0.1 \
-k $KEY
??? ?? ?????? ??(prune)???.
!tao unet train --gpus=1 --gpu_index=$GPU_INDEX \
-e $SPECS_DIR/spec_vanilla_unet_retrain.txt \
-r $USER_EXPERIMENT_DIR/unet_experiment_retrain \
-m $USER_EXPERIMENT_DIR/unet_experiment_pruned/model_unet_pruned.tlt \
-n model_unet_retrained \
-k $KEY
???(pruned) ??? Sim2Sim ?? ??? ?????? ?? ??? ???? ?? ???? ?? ?????.
!tao unet train --gpus=1 --gpu_index=$GPU_INDEX \
-e $SPECS_DIR/spec_vanilla_unet_domain_adpt.txt \
-r $USER_EXPERIMENT_DIR/semseg_experiment_domain_adpt \
-m $USER_EXPERIMENT_DIR/semseg_experiment_retrain/model_unet_pruned.tlt\
-n model_domain_adapt \
-k $KEY
??
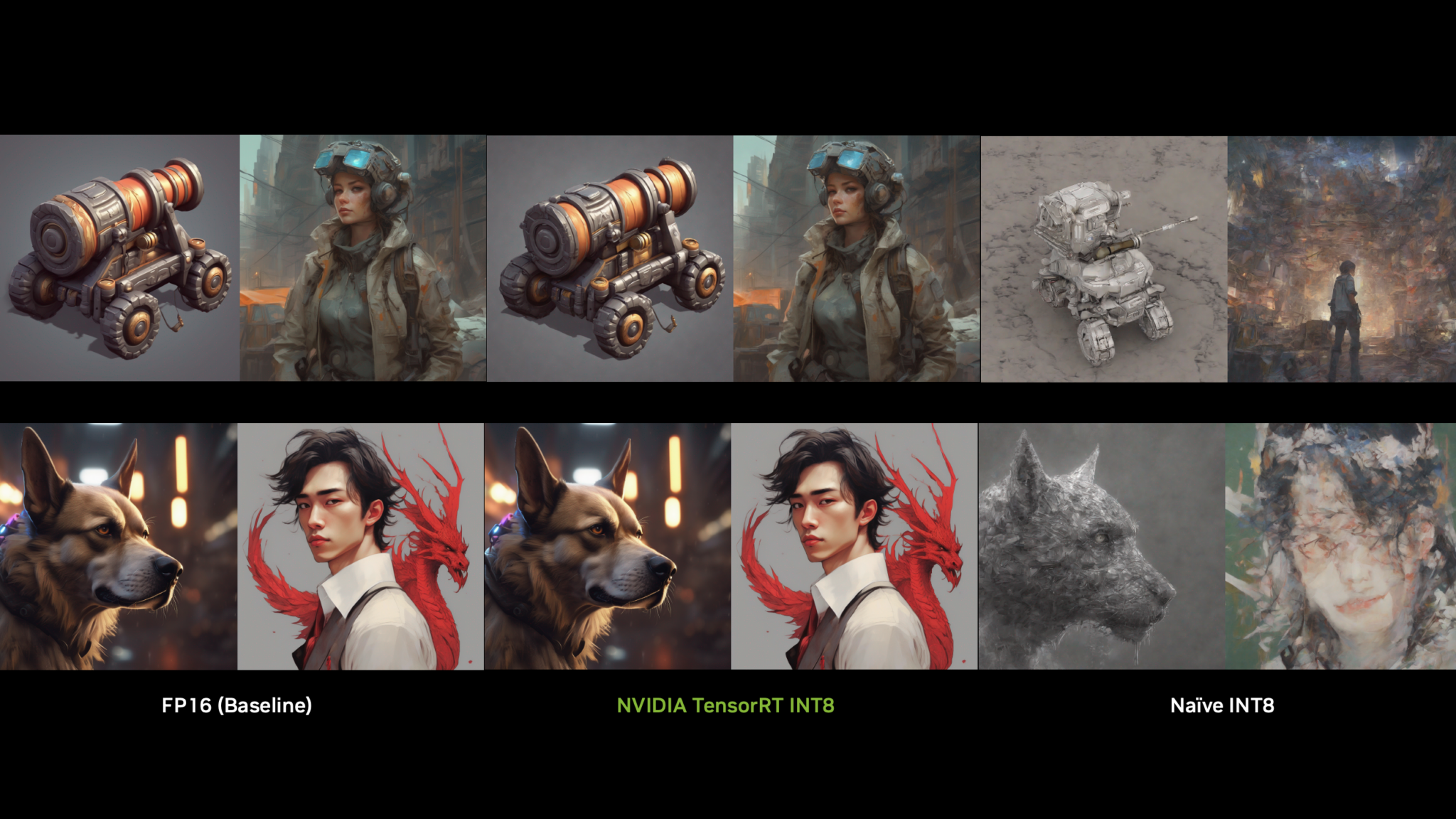
? 1?? ???? ?? ??? ??? ?? ?? ?? ??? ?????. ?? ???? ??? ?? ?? ? ???? ??? ?? ??? ??? ??? 1/17? ???? NVIDIA Jetson Xavier NX?? ?? ? ?? ???? 5? ? ?? ?? ??? ??????.
| Model | Dataset | Training Evaluations | Inference Performance | ||||
| Pruned | Fine-Tune on Real World Data | Training Set | Validation Set | F1 Score (%) | mIoU (%) | Precision | FPS |
| NO | NO | Sim | Sim | 0.990 | 0.981 | FP16 | 3.9 |
| YES | NO | Sim | Sim | 0.991 | 0.982 | FP16 | 15.29 |
| YES | NO | Sim | Real | 0.680 | 0.515 | FP16 | 15.29 |
| YES | YES | Real | Real | 0.979 | 0.960 | FP16 | 15.29 |
| YES | YES | Real | Real | 0.974 | 0.959 | INT8 | 20.25 |
? 3. Sim2Sim ? Sim2Real? ??
????? ???? ?? ???? ?????? 25K ???? ???? ??, ?? ??? ?? ?? ???? ???? ???? 44?? ????? ?????. ?? ???? ?? ?????? 56?? ????? ?????. ?? ???? ??, ? ?? ?? ?????? ??? ?????? ??????. ??? ?? ??? ??? 960×544???. ?? ??? NVIDIA TensorRT trtexec ??? ???? ?????.
NVIDIA Isaac ROS? ??? ??
? ????? ???? ? ???? ??? ??? Jetson Xavier NX? ???? iRobot? Create 3 ??? NVIDIA Isaac ROS? ???? ?? ??? ???? ??? ?????. Create 3 ??? NVIDIA Isaac ROS ??? ?? ??? ?? ROS2?? ?????.
? ????? ?? ?? ??? ???? ?? /isaac_ros_image_segmentation/isaac_ros_unet GitHub ?????? ?????.
?? ?? ?? ??? ????? /NVIDIA-ISAAC-ROS/isaac_ros_image_segmentation GitHub ??????? ?? ??? ?????.
Docker ????? ?? ?? ???:
$isaac_ros_common/scripts/run_dev.sh your_ws
?? ??? ???? ??:
isaac_ros_dnn_encodersisaac_ros_nvengine_interfaces- ?? ???(? ??? ??? ? ??)
isaac_ros_tensor_rtisaac_ros_triton
?? ?? ?? ? ??:
$cd /workspaces/isaac_ros-dev $colcon build && . install/setup.bash
?? ????? ????? ?? ?? ??(.etlt) ??? ????:
$scp <your_machine_ip>:<etlt_model_file_path> <ros2_ws_path>
???? TLT ??(.etlt)? ??? TensorRT ?? ???? ?????. INT8 ??? ?? ?? ??? ?????.
tao converter -k tlt_encode \
-e trt.fp16.freespace.engine \
-p input_1,1x3x544x960,1x3x544x960,1x3x544x960 \
unet_freespace.etlt
Isaac ROS image segmentation? ??? ????:
- TensorRT ?? ?? ??? ??? ????? ?????.
config.pbtxt? ?????.isaac_ros_unet?? ??? ?? ?? ?? ? ??? ???????.- ?? ??? ?? ???? ?????.
$ colcon build --packages-up-to isaac_ros_unet && . install/setup.bash $ ros2 launch isaac_ros_unet isaac_ros_unet_triton.launch.py
??
? ?????? NVIDIA Isaac Sim? ?? ??? ???? ??? TAO Toolkit? ??? ?? ??, NVIDIA Isaac ROS? ??? ?? ?? ?? ???? ?? ? ?? ?????? ???????.
NVIDIA Isaac Sim? TAO Toolkit? ?? AI ????? ???? ????? ?????, ?? ???? ???? AI ?? ??? ???? AI ?? ?? ??????? ???? ??? ? ????.
/NVIDIA-AI-IOT/robot_freespace_seg_Isaac_TAO GitHub ????? ???? ? ??? ?????.