?? ???? ?? ??? ??(AMR)? ???? ?? AI ??? ??? ? ??? ??? ? ? ????. ? ????? ????? ?? ? ????? ????. ?? ???? ???? ???? ???? ??? ? ?? ?? ??? ??? ???? ?? OpenUSD ? ?? ???? ??? ??? ?? ?? ??? ?????.
? ?????? ?? ???? ???? ?? ??? ?? ????? AMR? ???? ??? ?????. ??? ?? ????? ???? ??? ???? ?? ??? ???? ? ?????. ??? ????? AMR? ??? ?? ???? ??? ??? ?? ?????.
? ??? ????? ??? ?? ??? ?? ???? ???? ??? ??? ??? AI ??? ????? ???. ?? ????? ?? ??? ????? ??? ? ?? ??? ????. ???? 3D ??????? ??? ??? ?? ???? ?? ??? ??(SDG)? ?? ??? ??? ???? ?? ?? ????? ?????? ? ????.
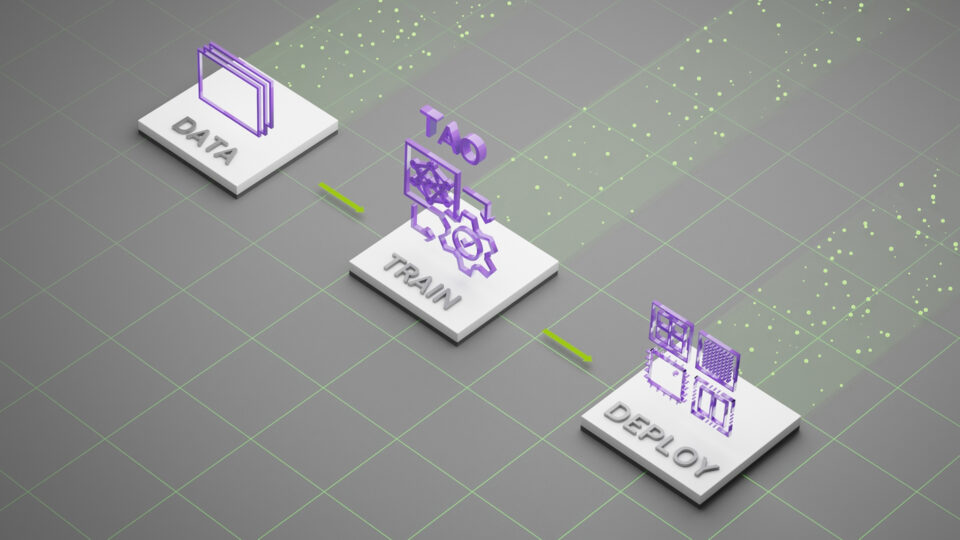
? ?? ????? ???? ?? ?? ????? ???? ?? ???? ???? ??? ?? ?? ??? ????. ? ????? NVIDIA Isaac Sim?? NVIDIA Omniverse ??????? ???? ?? ???? ???? ??? ?????. ?? ?? NVIDIA TAO ???? ?? ???? ??? ?????. ????? ?? ????? ??? ??? ????? ????? ???? ??? ??? ??? ??? ? ??? ? ?? ?? ???? ?????.
Omniverse ??????? ??? ?? ???? ? ?????(OpenUSD)? ???? ?????? ??? ? ??? ???? ??? ???? NVIDIA Omniverse? ?? ?? ?????. ???? ??????? ?? ??? ?? ??? ?? ?????? ???? ??? ?? ??? ????? ??????? ?? ???? ??? ? ????.
?? ???? ???? ?? ?? ????
?? ????? ?? ?? ??? ?? ??? ???? ?? ?? ???? ?? ??? ??? ??? ?? ?????. ? ????? Omniverse Replicator API? ?? ???? Python ????? ???? ??? ?????.
? ???? ??? ??? ????? ????? ???? ??? ?? ??? ??? ??????. ?? ?? ?? ???? ?? ??? ??? ??????. ?????? ??? ??? ?? ? ?? ??? ? ??? ??????.
???? ?? ?? ????? ???? ????? ??? ?????? ???. ????? ??? ??, ??, ???, ??, ?? ? ??? ????? ???? ???? ?? ??? ?? ??? ???? ??? ??? ? ????.
?? ??? ?????, 3D ? ?? ? NVIDIA Omniverse? ??? OpenUSD? ???? ?? ??? ????? ?? ??? ? ????. ?? ????? ????? ???? ???? ? ???, ???? ?? ??? ?? ??? ?????? ??? ? ????.
??
? ??? ????? NVIDIA RTX GPU? ??? ???? ?? ??? NVIDIA Isaac Sim? ???? ??? ???. Isaac Sim? ?? ??? ??? ?? Omniverse Replicator? ?? ??? ???? ?? ??? ???? ????? ?????????. ?? ? ??? ?? ??? ??? ?? ??? ?????.
Isaac Sim? ???? ?? GitHub? NVIDIA-AI-IOT/synthetic_data_generation_training_workflow?? ?? ??? ????? ? ????.
1??: ?? ? ??? ?? ????
? ?? ???? ?? ??? ?? ??? ??, ???? ??? ??????. ? ????? ??? ???? ????? ?? ??? ????.
?? ????? ?????:
ENV_URL = "/Isaac/Environments/Simple_Warehouse/warehouse.usd"
open_stage(prefix_with_isaac_asset_server(ENV_URL))?? ?? ??? ??? ?? ???? ?????. ??? ?? SimReady ?? ??????? ??? ? ????.
PALLETJACKS = ["http://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/DigitalTwin/Assets/Warehouse/Equipment/Pallet_Trucks/Scale_A/PalletTruckScale_A01_PR_NVD_01.usd",
"http://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/DigitalTwin/Assets/Warehouse/Equipment/Pallet_Trucks/Heavy_Duty_A/HeavyDutyPalletTruck_A01_PR_NVD_01.usd",
"http://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/DigitalTwin/Assets/Warehouse/Equipment/Pallet_Trucks/Low_Profile_A/LowProfilePalletTruck_A01_PR_NVD_01.usd"]
cam = rep.create.camera(clipping_range=(0.1, 1000000))SimReady ?? ????? ?? ??? ??? ??? ??? ??? ???? ????? ??? 3D ???????. ?? ??? ??? ?????? ??? ?? ???? ????.
???? ??? ?? ???? ??? ????? ?????:
with cam:
rep.modify.pose(position=rep.distribution.uniform((-9.2, -11.8, 0.4), (7.2, 15.8, 4)),look_at=(0, 0, 0))
# Get the Palletjack body mesh and modify its color
with rep.get.prims(path_pattern="SteerAxles"):
rep.randomizer.color(colors=rep.distribution.uniform((0, 0, 0), (1, 1, 1)))
# Randomize the pose of all the added palletjacks
with rep_palletjack_group:
rep.modify.pose(
position=rep.distribution.uniform((-6, -6, 0), (6, 12, 0)),
rotation=rep.distribution.uniform((0, 0, 0), (0, 0, 360)),
scale=rep.distribution.uniform((0.01, 0.01, 0.01), (0.01, 0.01, 0.01)))
????? ???? ??? ?? ?? ???? ?????:
writer = rep.WriterRegistry.get("KittiWriter")
writer.initialize(output_dir=output_directory,
omit_semantic_type=True,)? ???? ??????? ?? ???? KittiWriter? ???? ?? ?? ???? ?? ??? KITTI ???? ?????. ??? ?? ?? ??????? ???? ? ?????.
??
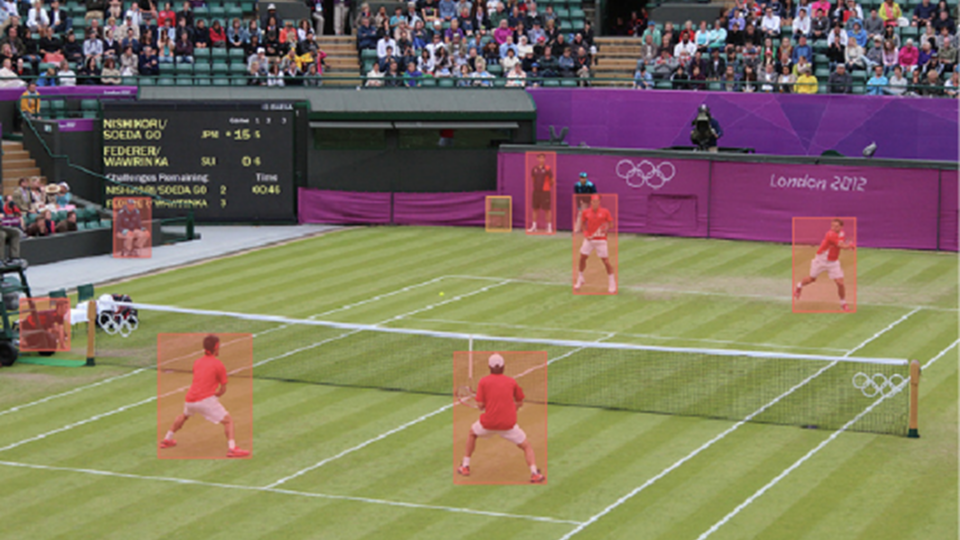
? ? ?? ?? ??? ???? ?? ?? ?? ??? ????? ?? ?? ?? ??? ???? ??? ??? ??? ?? ?? ??? ??? LOCO ??? ??? ??????.
?? ???? ??? ??? ???? ??? ?? ????? ???? ??? ?????(?? 2). ??? ?? ??? ?? ??? ?? ?? ??? ???????. ? ??? ? ?? ?? ????? ?? ?? ??? ? ?? ?????. ??? ??? ??? ?? ?? ??? ??? ? ????.

2??: ??? ?? ? ?? ?? ??
? ????? ? ?? ???? ??? ??? ??? ?? ?? ???? ?? ??? ???? ??????.
???? ?? ??? ?? ????? ??????:
# Randomize the lighting of the scene
with rep.get.prims(path_pattern="RectLight"):
rep.modify.attribute("color", rep.distribution.uniform((0, 0, 0), (1, 1, 1)))
rep.modify.attribute("intensity", rep.distribution.normal(100000.0, 600000.0))
rep.modify.visibility(rep.distribution.choice([True, False, False, False, False, False, False]))
# select floor material
random_mat_floor = rep.create.material_omnipbr(diffuse_texture=rep.distribution.choice(textures), roughness=rep.distribution.uniform(0, 1), metallic=rep.distribution.choice([0, 1]), emissive_texture=rep.distribution.choice(textures), emissive_intensity=rep.distribution.uniform(0, 1000),)
with rep.get.prims(path_pattern="SM_Floor"):
rep.randomizer.materials(random_mat_floor)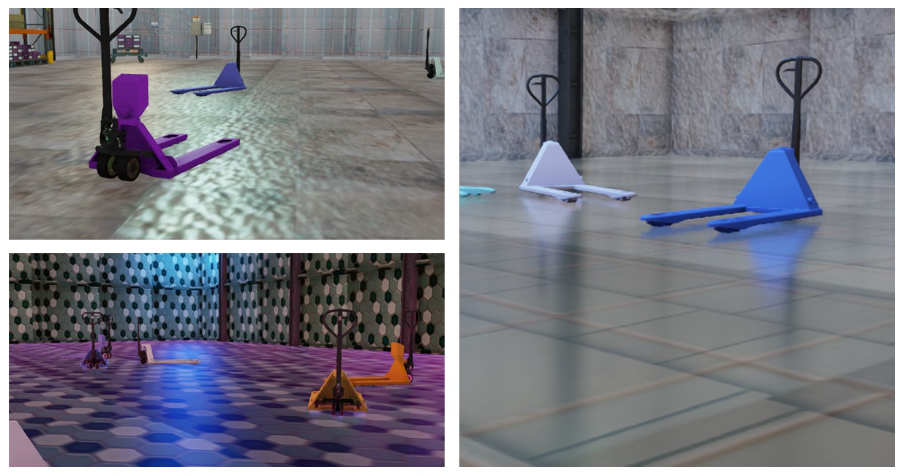
??
? ?? ??? ??? ? ?? ????? ???? ??? ?? ????? ?????. ?? ???? ??? ? ??? ?? ? ??? ?? ??? ??? ???? ???? ???? ????. ?? ???? ????? ???? ???? ?? ?? ??? ???? ? ??? ?? ?? ???? ????.
??? ??? ???? ????? ????? ?? ?? ? ?? ????? ?????. ? ??? ? ?? ???? ???? ?? ???? ???? ? ??? ???.

3??: ?? ?? ????
? ????? ??? ?? ???? ?? ?? ????? ?????. ??? ?? ??? ??? ??? ? ?? ???? ?????. ? ???? ?? ? ???? ??? ?? ?? ??? ?????.
??? ?????? ?????:
DISTRACTORS_WAREHOUSE = ["/Isaac/Environments/Simple_Warehouse/Props/S_TrafficCone.usd",
"/Isaac/Environments/Simple_Warehouse/Props/S_WetFloorSign.usd",
"/Isaac/Environments/Simple_Warehouse/Props/SM_BarelPlastic_A_01.usd",
"/Isaac/Environments/Simple_Warehouse/Props/SM_BarelPlastic_A_02.usd",
"/Isaac/Environments/Simple_Warehouse/Props/SM_BarelPlastic_A_03.usd"]
# Modify the pose of all the distractors in the scene
with rep_distractor_group:
rep.modify.pose(
position=rep.distribution.uniform((-6, -6, 0), (6, 12, 0)),
rotation=rep.distribution.uniform((0, 0, 0), (0, 0, 360)),
scale=rep.distribution.uniform(1, 1.5))? ????? ??? ?? ??? ?? Isaac Sim ???? ??? ? ????. ???? ???? ??? ???? ?????.

??
?? 6? ? ?? ??? ??? ?????. ? ??? ??? ?? ???? ??? ? ??? ?? ??? ? ????. ? ?? ??? ?? ?? ??? ?? ???????.

?? ??
? ?? 5,000?? ???? ???? ? ??? ?? ??? ???????. ??? ??? ???? ???? ?? ?? ???? ??? ??? ? ?? ??? ???? ? ?????? ?? ??? ? ????.
??? ??? ?? NVIDIA TAO ??? ???? resnet18 ??? ?? DetectNet_v2 ??? ??????. ? ??? ???? ?? ???? ?? ??? ????. ??? ?? ??? ???? ???? ??? ???? ? ?????? ??? ??? ? ????.
??? ???? KITTI ???? ??????. ??? Omniverse Replicator? ???? ?? ??? ???? ???? ??? ?? ???? ???? ??? ? ????. ??? ?? ?? ?????? ???? ?????.
?? ?? ???? ?? ???? ?? ???? ???? ??? ?? ????. ????? ?? ???? ?? ? ?? ??? ????? ?? ???? NVIDIA Jetson? ??? ? ????.
Omniverse Replicator? ?? ??? ????? ??
Omniverse Replicator? ???? ?? ??? ?? ??? ?? ????? ?? ?? ???? ??? ?? ???? ??? ??? ????? ???? ???? ??? ??????? ??? ??? ? ????. ??? ??? ????? ???? ??? ??? ??? ???? ???? ??? ??? ???? ?? ?? ??? ??? ? ????.
? ???? ??? ?????? ????? GitHub? NVIDIA-AI-IOT/synthetic_data_generation_training_workflow? ?????. ?? ?????? ??? ???? ??? ??? NVIDIA? ??? ??(Rishabh Chadha)? ?? ???? ?? ???(Jenny Plunkett)? Omniverse ??????? ?? ???? ???? ?? ??? ?? ?? ??? ???? ??? ???? ??? 2? ?????.
??? ??? ?? ??? ?? ?????? ????? Omniverse? ??? ?????? Omniverse ???? Replicator ???? ??? ????. ?? ??? ?? ?? ????? ?? ?? ??? ????? ?? ??? ??? ??? ???? ?? Omniverse Replicator ????? ??? ?? ????
NVIDIA? ?? ???? SDG ?????? ???? ???? ?? ??? ??? ??? Omniverse Replicator 1.10? ??????. ??? ??? NVIDIA Omniverse Replicator 1.10? ???? ?????? ?? ??? ?? ??? ????? ?????.
?? ?? ? ???? ?????? ?? ?? ????? ??? NVIDIA Isaac ROS 2.0 ? NVIDIA Isaac Sim 2023.1? ?? ??? ? ????. ??? ??? NVIDIA Isaac ???? ?? ????? ? ?? ??? AI ?? ?? ?? ???? ?????.
????? ???? Instagram, LinkedIn, Medium, Threads, Twitter?? Omniverse? ????? NVIDIA Omniverse? ?? ?? ??? ?????. ??? ??? ??, Discord ??, Twitch ? YouTube ???? ?????.