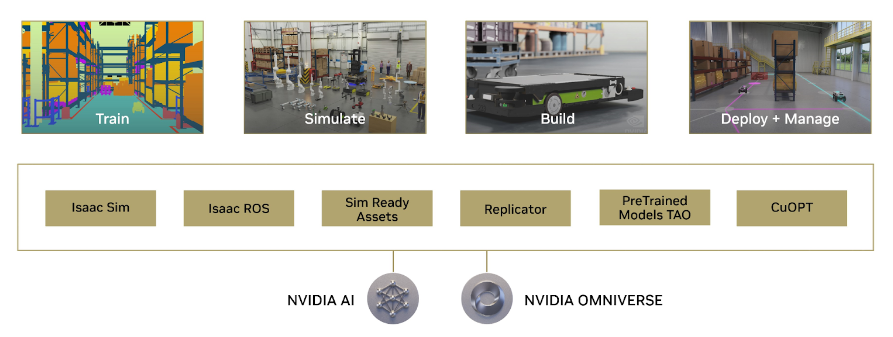
NVIDIA 于今日在 ROSCon 2023 發布了對 NVIDIA Isaac Robotics 平臺的重大更新。該平臺為全球機器人開發者提供高性能感知和高保真模擬。這些更新包括 NVIDIA Isaac ROS 2.0 和 NVIDIA Isaac Sim 2023.1,以及感知和模擬升級,可為 ROS 開發者簡化基于 AI 的高性能機器人應用的構建和測試。
“ROS 不斷發展壯大,為整個機器人開發社區提供開源軟件。” Open Source Robotics Foundation 表示,“新的 NVIDIA 預構建 ROS 2 軟件包在此版本中推出,將使 ROS 2 隨時可供廣大用戶使用,從而加速 NVIDIA Jetson 開發者社區的增長。”
Isaac ROS 2.0
隨著機器人向更高級別的自主性發展,以及各種傳感器技術的不斷擴散,CPU 受限處理的限制變得顯而易見。加速計算已成為克服這些瓶頸的自然解決方案。
Isaac ROS 為 ROS 社區帶來了急需的加速計算能力,使新一代機器人解決方案的開發成為可能。除了提供一系列加速 ROS 軟件包外,NVIDIA 還與 Open Robotics 合作以提高中間件本身的效率。如需了解詳情,請參閱 NVIDIA Isaac Transport for ROS 提升 ROS 2 應用的感知性能。
Isaac ROS 2.0 的發布實現了生產級質量就緒。重大改進包括:
- 原生 ROS 2 Humble 支持: NVIDIA 將在 Ubuntu 20.04 上托管適用于 JetPack 5 的安裝就緒型 ROS 2 Humble 軟件包,無需編譯源代碼。
- NITROS ROS 橋接器:與標準 ROS 橋接器相比,此優化的 ROS 橋接器可將速度提升 2 倍,從而將 Isaac ROS 加速擴展到 ROS Noetic 應用程序。
- CUDA NITROS:支持開發者將自己的 DNN 模型與自定義編碼器和解碼器結合使用,并利用 NITROS 的加速功能。
- Stereolabs ZED 攝像頭集成:Isaac ROS 現已與 Stereolabs ZED 攝像頭實現集成。
- Nova Carter:Isaac ROS 軟件(包括 Nav 2 導航堆棧)現已支持 Nova Carter,這是一款由 NVIDIA 提供支持的機器人研發參考 AMR,搭載 NVIDIA Jetson AGX Orin。
- ESS 3.0 性能:新的 ESS 3.0 深度感知 DNN 模型提升了準確性和性能。
世界各地的開發者將 Isaac ROS 用于農業、倉庫自動化、最后一英里配送和服務機器人等不同領域的高性能機器人解決方案。
“正是 NVIDIA 產品的廣度使其非常適合 FarmX,” FarmX 機器人副總裁 Dan Hennage 說。”從 Isaac ROS 的操作環境和庫,到允許我們在無人機和大型拖拉機等車輛上部署的各種模塊,NVIDIA Jetson 和 Isaac ROS 使我們能夠專注于開發應用程序,而無需擔心平臺。”
.lumen 的首席執行官兼創始人 Cornel Amariei 表示:“我們打造的是最先進的盲輔助技術,將自動駕駛縮小到人們可以舒適地戴在頭上的程度。之所以能夠做到這一點,是因為 NVIDIA Jetson 平臺以及 Isaac ROS 中經過優化的軟件包、節點和功能。從 vSLAM 到立體感知,沒有其他平臺能讓我們做到這一點。”
Isaac Sim 2023.1
越來越多的機器人采用 AI 將加速各行各業(從制造到物流再到汽車)的自動化。開發和測試用于機器人感知或控制的 AI 模型的人面臨的挑戰通常是數據稀缺。高保真模擬是解決這一稀缺問題的關鍵技術。
基于 NVIDIA Omniverse,Isaac Sim 是一款機器人模擬器,用于開發、訓練、測試和部署支持 AI 的機器人。強大的內置功能包括 NVIDIA Omniverse Replicator 用于生成合成數據,以及 Isaac Gym 用于 GPU 加速的強化學習。借助最新版本的 Omniverse Replicator 1.10,開發者可以使用低代碼、基于 YAML 的配置器和異步渲染來 提升合成數據的生成。
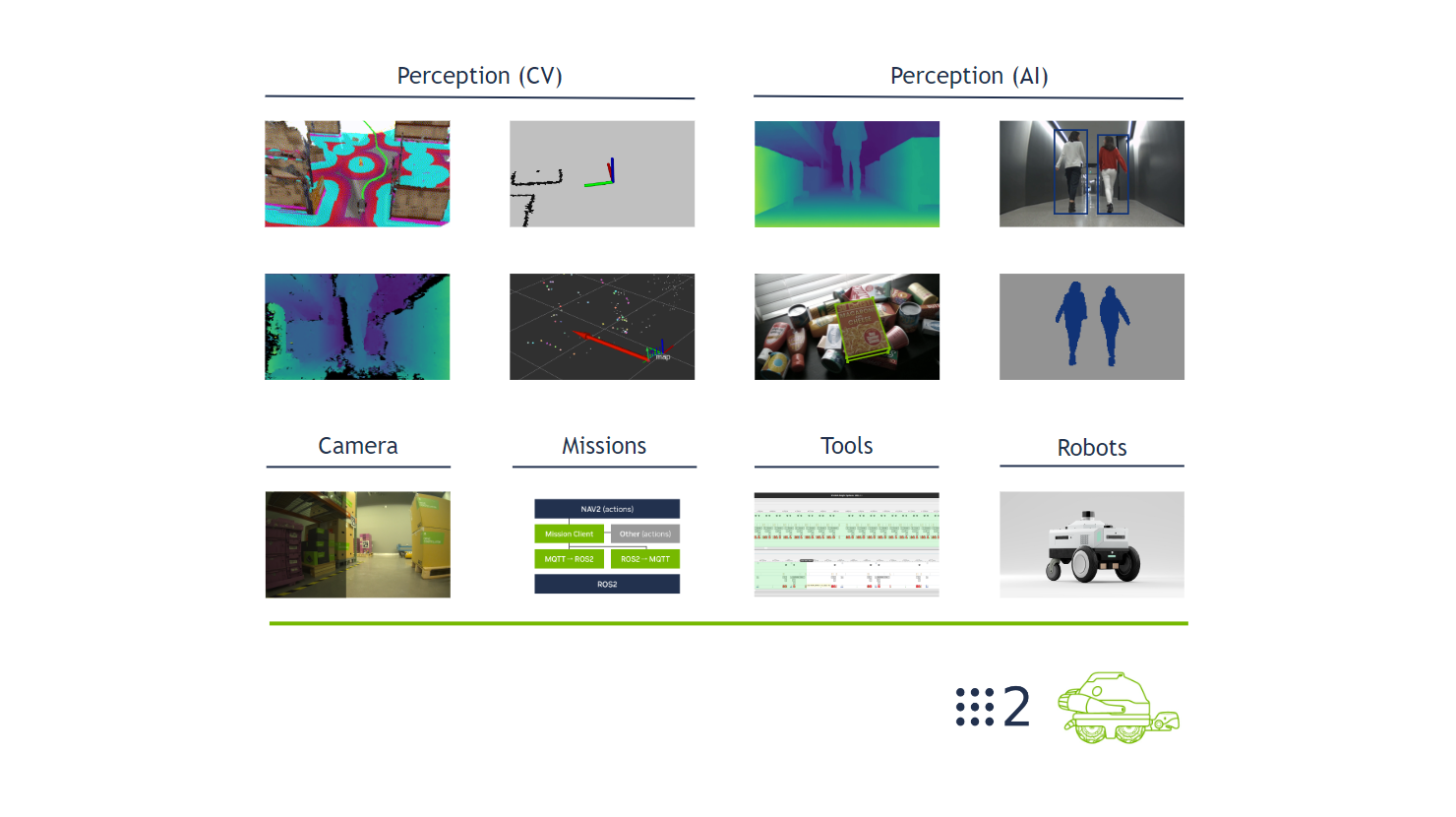
Isaac Sim 還包含適用于當今大多數熱門傳感器的精確傳感器仿真。它支持 ROS 和 ROS 2,此外還可以通過 Python 腳本進行控制。
Isaac Sim 2023.1 的發布為推進基于 AI 的機器人提供了許多新功能和改進,包括:
- 新的內置機器人模型和傳感器:快速開始使用內置機器人模型和傳感器。新的機器人模型包括 FANUC 和 Techman。新的傳感器包括 Orbbec,SENSING,Zvision、Ouster 和 RealSense。
- 改進了對 ROS 和 ROS 2 的支持:現在您可以創建自定義的 ROS 和 ROS 2 消息來支持您的仿真應用。URDF/MJCF 導入器已經開源,這將在您將機器人導入 Isaac Sim 時提供更多功能。
- 增強的合成數據生成 (SDG) 支持:為機械手和移動機器人應用添加仿真中的隨機化。詳細了解由最新版本的 Omniverse Replicator 支持的新 SDG 功能。
- 模塊化 3D 資產的倉庫組裝商:使用 SimReady 倉庫場景和資產,快速創建極具吸引力的倉庫環境,以測試和實施機器人解決方案。
許多公司都在遵循模擬優先的方法開發機器人和自動化解決方案。這需要在構建解決方案之前進行高保真模擬,以驗證設計和吞吐量。
“在協作機器人技術中,我們堅信,機器人的未來需要協作機器人與人類一起工作。”技術戰略副總裁 Jon Battles 說,“我們采用了一種模擬優先的開發方法,廣泛使用 Isaac Sim 來加快開發和部署時間。”
RIOS 工程副總裁 Chris Paulson 表示:“RIOS 對于 NVIDIA Isaac Sim 在設計、測試和實施未來智能工廠的先進 AI 機器人即服務 (RaaS) 工作單元方面的重要性。Isaac Sim 是降低項目風險、降低新工作單元設計風險和簡化復雜機器人任務執行開發的關鍵平臺。我們的內部面向客戶的工具也利用 Isaac Sim 作為平臺,快速高效地為客戶提供先進的機器人。”

NVIDIA Isaac Robotics 平臺的設計初衷是推動 AI 在機器人領域的發展。Isaac ROS 的更新將使 ROS 開發者更容易利用 NVIDIA AI 感知。Isaac Sim 具備新功能,可在虛擬世界中輕松開發、測試和訓練 AI 機器人,然后再將其部署到現實世界。加入使用 NVIDIA Isaac ROS 和 Isaac Sim 的數千名開發者的行列。
如需了解更多詳情,請注冊參加即將舉辦的 Isaac ROS 網絡研討會Need for Noetic Speed: Bringing NITROS to ROS。同時,歡迎加入NVIDIA 在 ROSCon 2023,了解最新公告、演示、競賽和合作伙伴新聞。您還可以查看 NVIDIA 的演講嘉賓和小組成員在RoboBusiness 2023的演講。
?