這是 NVIDIA DRIVE Labs 系列 中的最新視頻。這些視頻以工程為重點,介紹了各個自主車輛的挑戰以及 NVIDIA 驅動團隊如何應對這些挑戰。掌握 更多 NVIDIA DRIVE 內容 。
自動停車涉及一系列復雜的感知和決策算法,傳統上依賴高清( HD )地圖來檢索停車信息。
然而,地圖覆蓋率和較差或過時的本地化信息可能會限制此類系統。除此之外,系統還必須理解和解釋不同地區的停車規則。
在這個 DRIVE Labs 的帖子中,我們展示了基于 AI 的實時感知如何幫助將自動停車擴展到全球各個地區。
?
自動泊車系統概述
對停車規則的理解和解釋可能會比表面上看起來更加微妙。
可以覆蓋有效區域內的不同停車規則。例如,“禁止停車”可以覆蓋“禁止泊車”
此外,非停車相關標志可以推斷停車規則。例如,在德國,任何公共汽車站標志 15 米范圍內都不允許停車。在美國,停車標志前 30 英尺內停車是違法的。
最后,除了像物理標志這樣的明確線索外,還有攜帶停車信息的隱含標志。例如,在許多地區,交叉口表示上一個活動停車規則的結束。
基于高級算法的停車標志輔助( PSA )系統對于自動車輛了解停車規則的復雜性并做出相應反應至關重要。
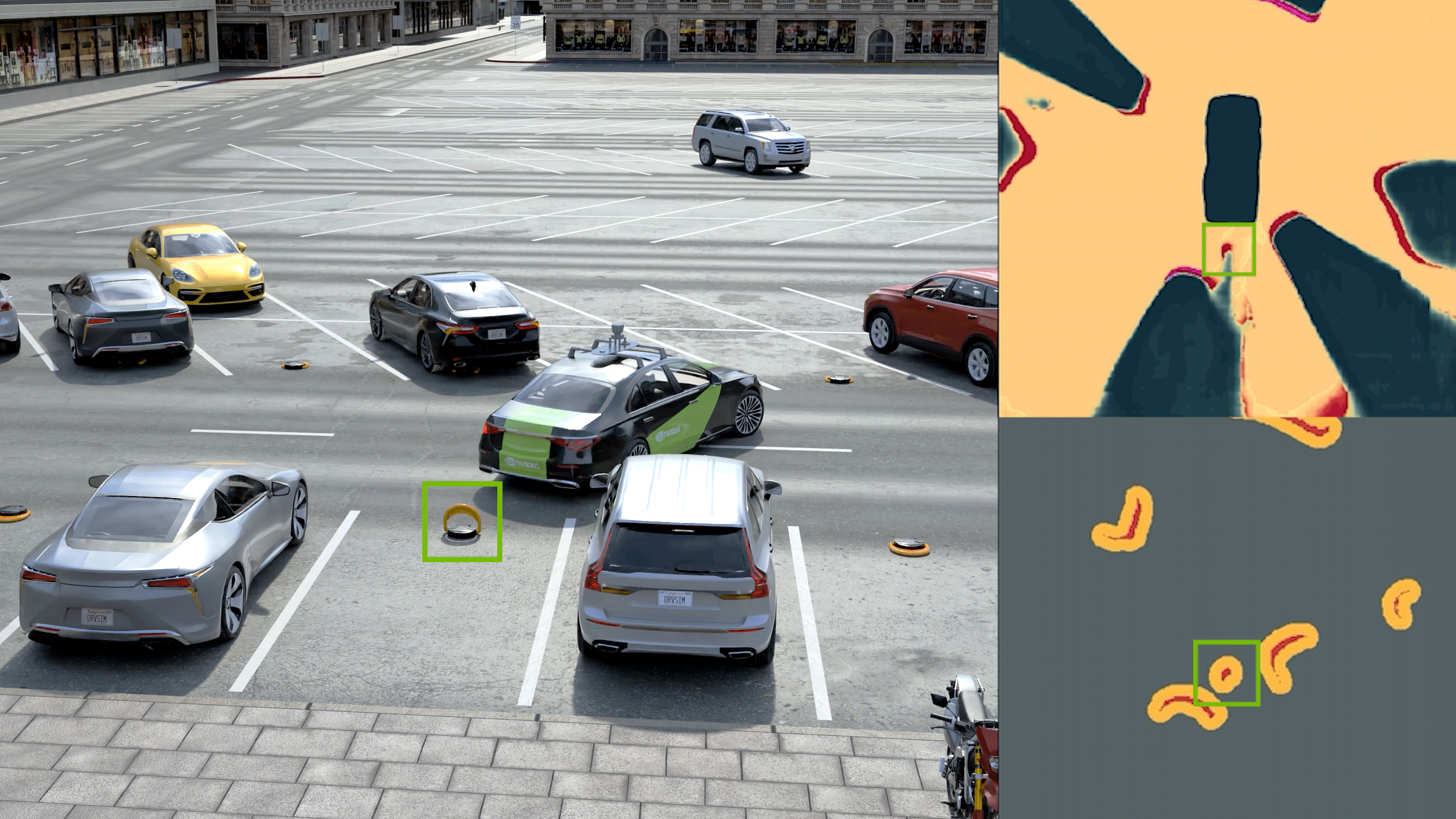
傳統的 PSA 系統僅依賴高清地圖的輸入。然而, NVIDIA DRIVE AV 軟件堆棧利用最先進的深度神經網絡( DNN )和計算機視覺算法來提高真實場景中自動停車的覆蓋率和魯棒性。這些技術可以實時檢測、跟蹤和分類各種停車交通標志和道路交叉口。
- WaitNet DNN 檢測交通標志和十字路口。
- wait perception 堆棧跟蹤單個標志和交點,通過三角測量提供 3D 位置。
- SignNet DNN 標識交通標志類型。
然后,來自模塊的結果被輸入 PSA 系統,該系統使用這些數據來確定汽車是否在停車帶內,限制條件是什么,以及汽車是否允許在該區域內停車或停車。
停車標志輔助系統概述
PSA 系統接收到檢測到的停車標志和道路交叉口后,將對象抽象為一個 啟動停車標志 或 終點停車標志 。這種抽象級別允許系統在全球范圍內擴展。
啟動停車標志 標志著新停車帶的潛在開始, 終點停車標志 可能會關閉一個或多個現有停車帶。圖 1 和圖 2 顯示了停車帶是如何形成的。
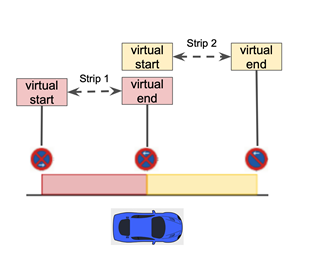
圖 1 將標志和道路交叉口抽象為停車帶。該圖顯示,單個標志可以生成多個虛擬標志。例如,中間的符號作為最左邊符號的“結束”符號,作為最右邊符號的“開始”。
除了形成停車帶外, PSA 系統還利用標志的語義將停車帶分為禁止停車、禁止停留、允許停車和未知狀態。然后,可以將此信息提供給駕駛員或任何自動停車系統。
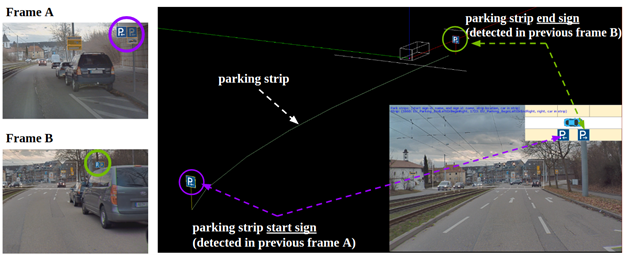
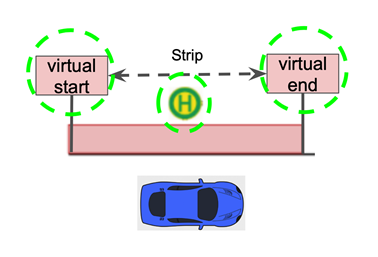
圖 3 顯示了 PSA 系統的主要功能工作流。在幀 A 中,檢測到“停車區開始”標志,并創建新的停車帶。汽車行駛一段時間后,檢測到“停車區結束”標志,該標志與該停車帶的開始標志相匹配。
最后, PSA 系統將所有激活的停車帶存儲在其存儲器中,并根據停車帶所隱含的交通規則向駕駛員發出當前停車狀態的信號。
結論
PSA 系統在 NVIDIA DRIVE AGX 上運行僅幾毫秒,就可以以驚人的準確性實現復雜的決策。它還兼容任何使用實時攝像頭傳感器輸入的僅感知自動車輛堆棧。
我們目前的 SignNet DNN 支持歐洲 20 多個停車標志,包括公共汽車停車標志、禁止停車標志和禁止停車標志,覆蓋范圍不斷擴大。我們還將光學字符識別( OCR )和自然語言處理( NLP )模塊添加到系統中,以處理符號上書寫文本攜帶的復雜信息。
要了解有關我們正在構建的軟件功能的更多信息,請參閱 NVIDIA DRIVE 實驗室 視頻系列的其余部分。
?