Posts by Akhil Docca

生成式人工智能/大語言模型
2025年 1月 6日
如何為基于感知的物理 AI 構建支持生成式 AI 的合成數據管道
訓練用于為機器人和自動駕駛汽車等自主機器提供動力支持的 物理 AI 模型 需要大量數據。獲取大量不同的訓練數據可能十分困難、耗時且昂貴。
2 MIN READ

邊緣計算
2025年 1月 6日
利用最新的 NVIDIA Isaac 版本推進機器人學習、感知和操控技術
在 CES 2025 上,NVIDIA 宣布了對 NVIDIA Isaac 的重要更新。NVIDIA Isaac 是一個由加速庫、
3 MIN READ

計算機視覺/視頻分析
2024年 10月 22日
ROS 2 和 NVIDIA Isaac Sim 機器人模擬與測試入門指南
物理 AI 賦能的機器人 需要在物理世界中自主感知、規劃和執行復雜任務,其中包括在動態和不可預測的環境中安全、高效地運輸和操控物體。
3 MIN READ
計算機視覺/視頻分析
2024年 6月 17日
使用 NVIDIA Isaac Sim 4.0 和 NVIDIA Isaac Lab 實現人工智能和模擬的機械增壓機器人工作流
以物理人工智能為動力的機器人時代已經到來。物理人工智能模型了解其環境,并自主完成物理世界中的復雜任務。許多復雜任務,
3 MIN READ

計算機視覺/視頻分析
2023年 8月 1日
利用 OpenUSD 和綜合數據開發智慧城市交通管理系統
智能城市代表了城市生活的未來。然而,它們可能會給城市規劃者帶來各種挑戰,尤其是在交通領域。為了取得成功,
2 MIN READ
計算機視覺/視頻分析
2023年 4月 17日
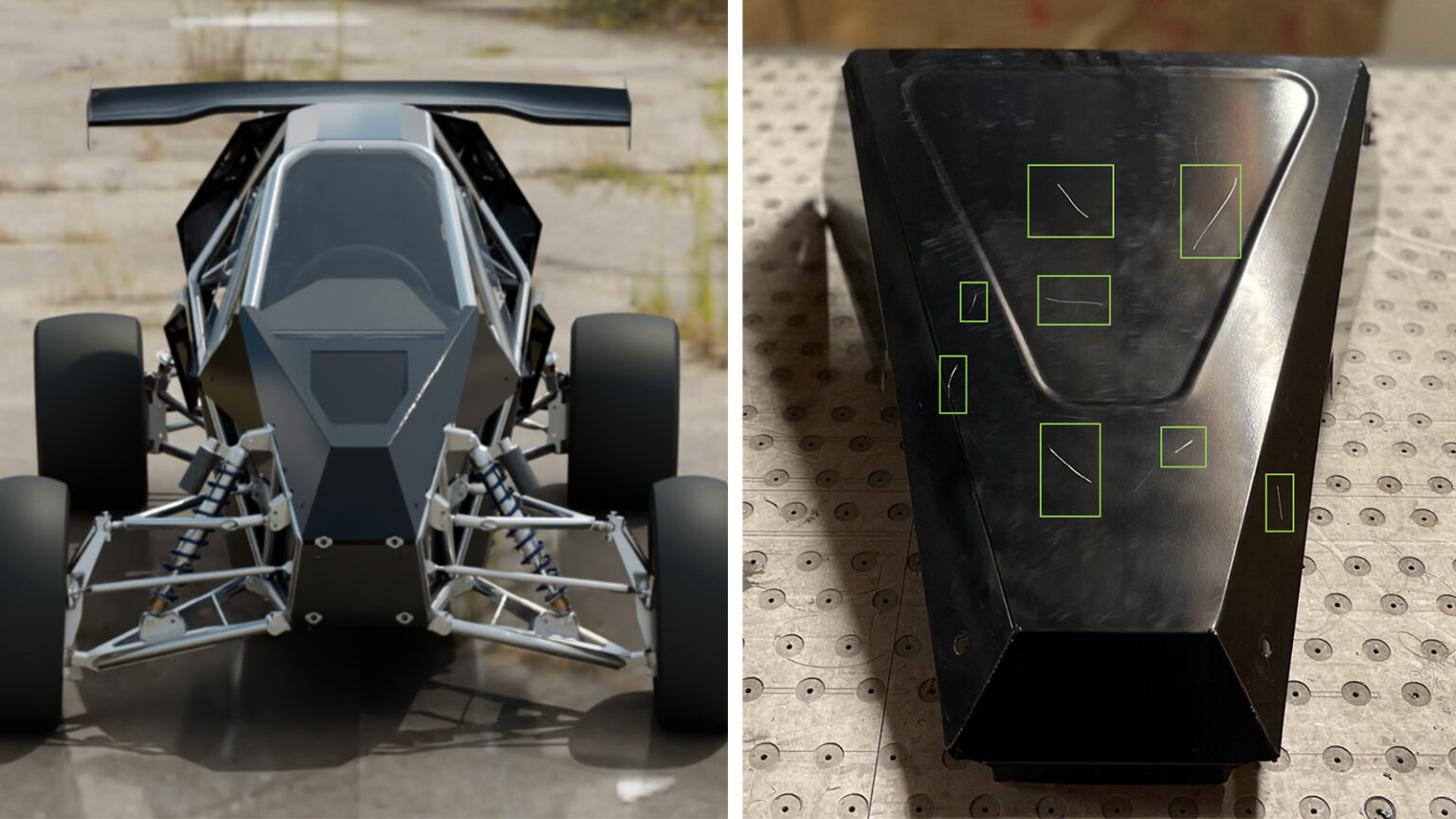
如何使用 NVIDIA Omniverse Replicator 使用合成數據訓練缺陷檢測模型
根據美國質量協會( ASQ )的說法,缺陷會讓制造商付出 幾乎占總銷售收入近20%的代價。我們每天互動的產品,如手機、汽車、電視和電腦,
3 MIN READ