Posts by Niko Suenderhauf
機器人
2022年 5月 26日
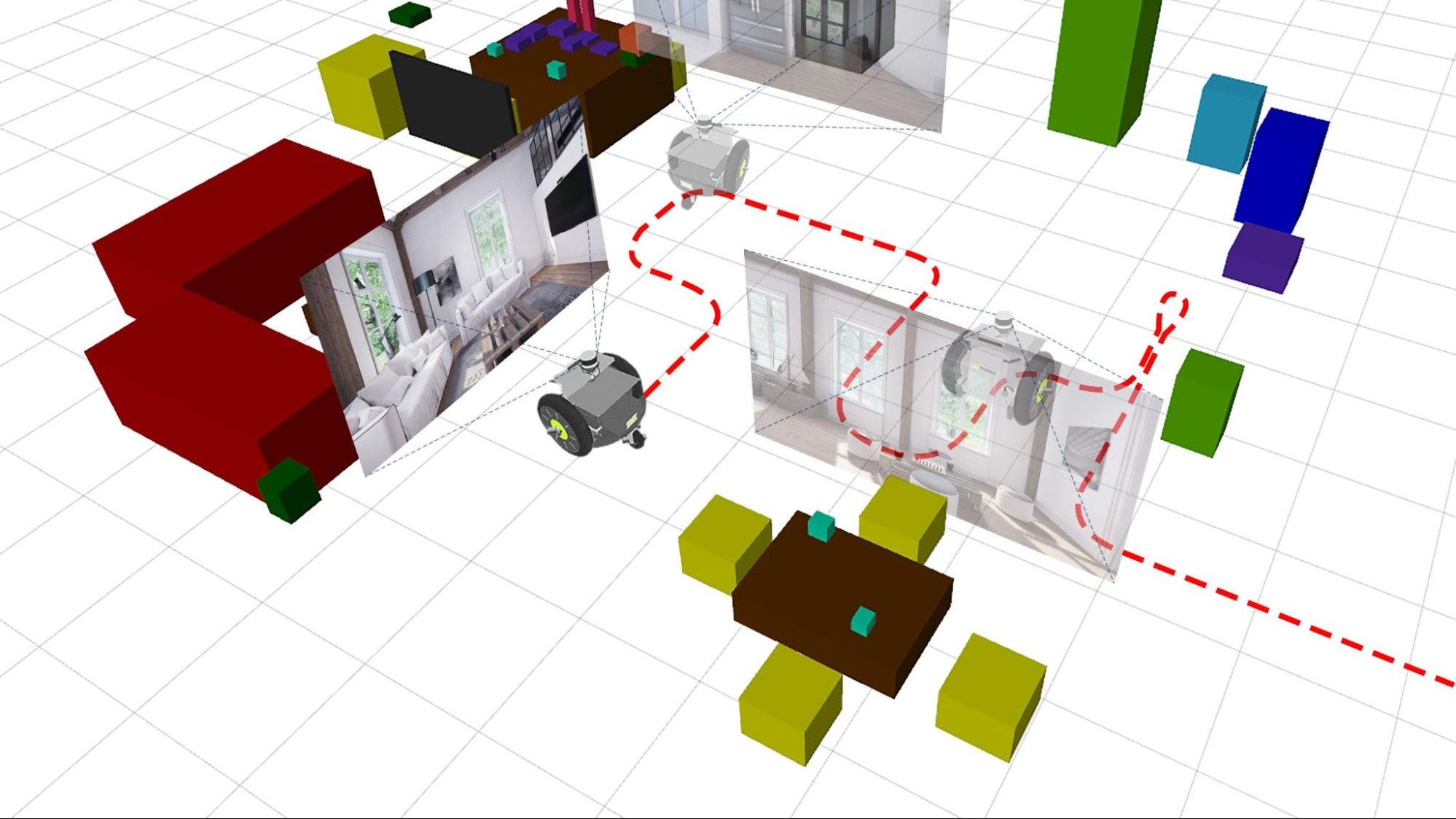
使用 BenchBot 和 NVIDIA ISAAC Sim 簡化機器人技術
機器人學的研究充滿了令人興奮和有趣的問題,但也有一些令人沮喪的問題,如傳感器校準、構建轉換樹、管理分布式系統以及調試脆弱系統中的奇異故障。
3 MIN READ