他們說“模仿是最真誠的恭維。”嗯,在波蘭開發者托馬斯托馬內克的機器人項目中,模仿或模仿是他的機器人馬里奧拉的目標。
在此最新版本中 Jetson 當月最佳項目 , Tomanek 開發了一個時髦的小機器人,使用預訓練的機器學習模型,使人機交互變得生動。該機器人的主控制器是 Jetson Nano 2GB .
使用 PoseNet models 使 Mariola 能夠識別人的姿勢和動作,然后使用這些模型使機器人模擬或復制這些人類動作。正如托馬內克所指出的那樣,“使用 Jetson 納米使實現這一目標變得非常簡單和直接。”
開發者在 YouTube 視頻中提供了關于 Mariola 的概述:
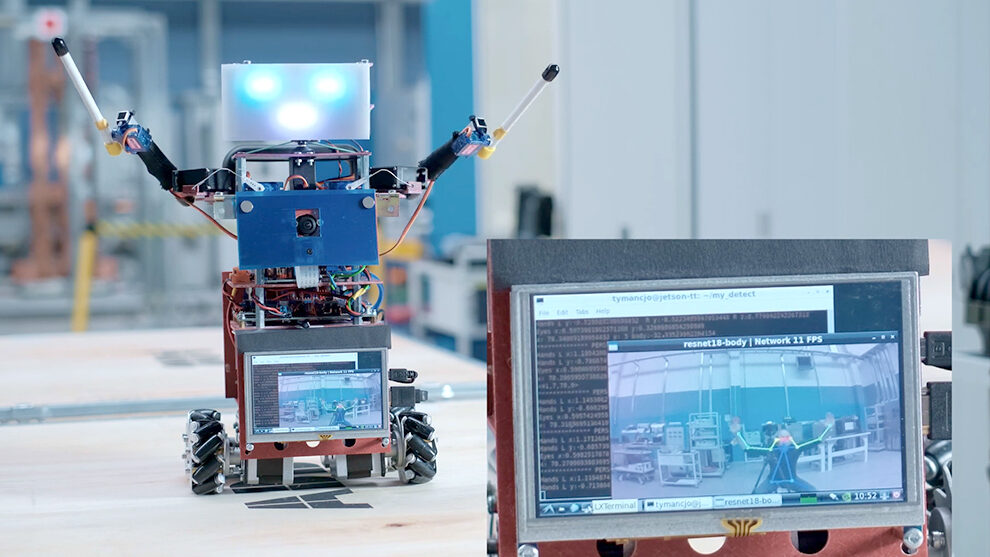
正如你們所見,馬里奧拉能夠用輪子駕駛,移動手臂,轉動頭部,做鬼臉。嵌入機器人身體每個部分的單獨 Arduino 控制器可以實現這些動作。伺服電機的單獨控制器控制手臂和頭部的運動。該機器人有四個機械輪,因此可以全方位移動。
馬里奧拉的面部表情使用由 Neopix LED 構建的單獨微控制器、一組 每只眼睛兩個 和一組 八張嘴巴 。雛菊鏈在一起,它們由一個單獨的 Arduino 納米板驅動,該板管理顏色變化和眨眼的外觀。
根據 Tomanek 的說法, Mariola 構建的一個關鍵思想是將每個子系統作為一個單獨的單元,并讓它們通過內部總線進行通信。有一個 UART / BT 接收器 Arduino nano ,它的作用是從用戶那里獲取命令,解碼它需要去的子載波,并通過 CAN BUS 發送。
每個子控制器從 CAN 總線獲取其命令,并為車輪、伺服(手和頭部移動)或面部(新像素)創建相應的動作。
Tomanek 在 NVIDIA 開發者論壇 中指出,機器人后面的 Jetson 納米級是大腦,通過 resnet18 身體運行自定義的 Python 腳本,當它檢測到人的關節時,返回關節的平面坐標。通過 IK 模型重新計算這些坐標以獲得伺服位置,結果通過 UART 發送給主 Arduino 。剩下的動作由阿杜伊諾人完成。
目前,馬里奧拉將一次檢測并模仿一個人的動作。如果機器人看不到任何人,或者檢測到多人,則不會發生任何動作。
為什么 Tomanek 為這個項目選擇了[of the Jetson 納米?正如他所指出的,“ Jetson 可用的預訓練模型的潛在威力,以及 Jetson Nano 的可負擔性,讓我使用 2GB 版本來學習和了解它的工作原理。”
“這對我來說是一個正在進行的工作和學習項目,” Tomanek notes 。雖然馬里奧拉沒有明確的目標,但他認為這是一個實驗和學習使用這項技術可以實現什么的機會。“到目前為止,最好的結果是,通過機器學習模型驅動這些行為,這個小機器人具有某種自主性。”
當人們第一次與馬里奧拉互動時,托馬內克( Tomanek ) says “它總是會產生微笑。這是人機互動中一個非常有趣的方面。”很容易理解為什么會發生這種情況。只要看看馬里奧拉的表演——我們不敢讓你笑
視頻 2 。 Arduino 和 Jetson Nano 機器人項目演示
Mariola project 仍在積極開發中,并定期進行修改和更新。正如托馬內克在他的概述視頻 中總結的那樣,“我們將看到未來會帶來什么。”
有關該項目的更多詳細信息,請參閱 GitHub repository 。
?