世界上為人工智能開發者開發的終極嵌入式解決方案, Jetson AGX Xavier ,現在作為獨立的生產模塊從 NVIDIA 發貨。作為自主機器 NVIDIA 的 AGX 系統 的一員, Jetson AGX Xavier 是將先進的人工智能和計算機視覺部署到邊緣的理想選擇,使機器人平臺具有工作站級的性能,并且能夠在不依賴人工干預和云連接的情況下完全自主地運行。由 Jetson AGX Xavier 提供動力的智能機器可以自由地在其環境中進行交互和安全導航,不受復雜地形和動態障礙物的阻礙,完全自主地完成現實世界的任務。這包括包裝交付和工業檢驗,需要先進的實時感知和推理能力。作為世界上第一臺專門為機器人和邊緣計算而設計的計算機, Jetson AGX Xavier 的高性能可以處理視覺里程測量、傳感器融合、定位和映射、障礙物檢測,以及對下一代機器人至關重要的路徑規劃算法。開發人員現在可以開始批量部署新的自主機器。
最新一代 NVIDIA 業界領先的嵌入式 Linux 高性能計算機 Jetson AGX 系列, Jetson AGX Xavier 以 100x87mm 的緊湊型外形,提供了 GPU 工作站級的性能和無與倫比的 32 兆兆( TOPS )峰值計算和 750Gbps 的高速 I / O 。用戶可以根據應用需要配置 10W 、 15W 和 30W 的工作模式。 Jetson AGX Xavier 為可部署到邊緣的計算密度、能源效率和人工智能推斷能力設置了新的標準,使具有端到端自主能力的下一級智能機器成為可能。
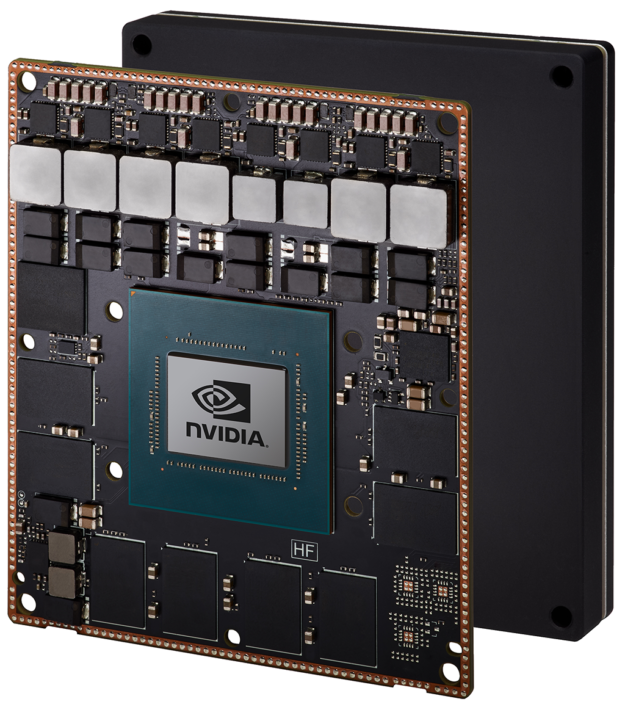
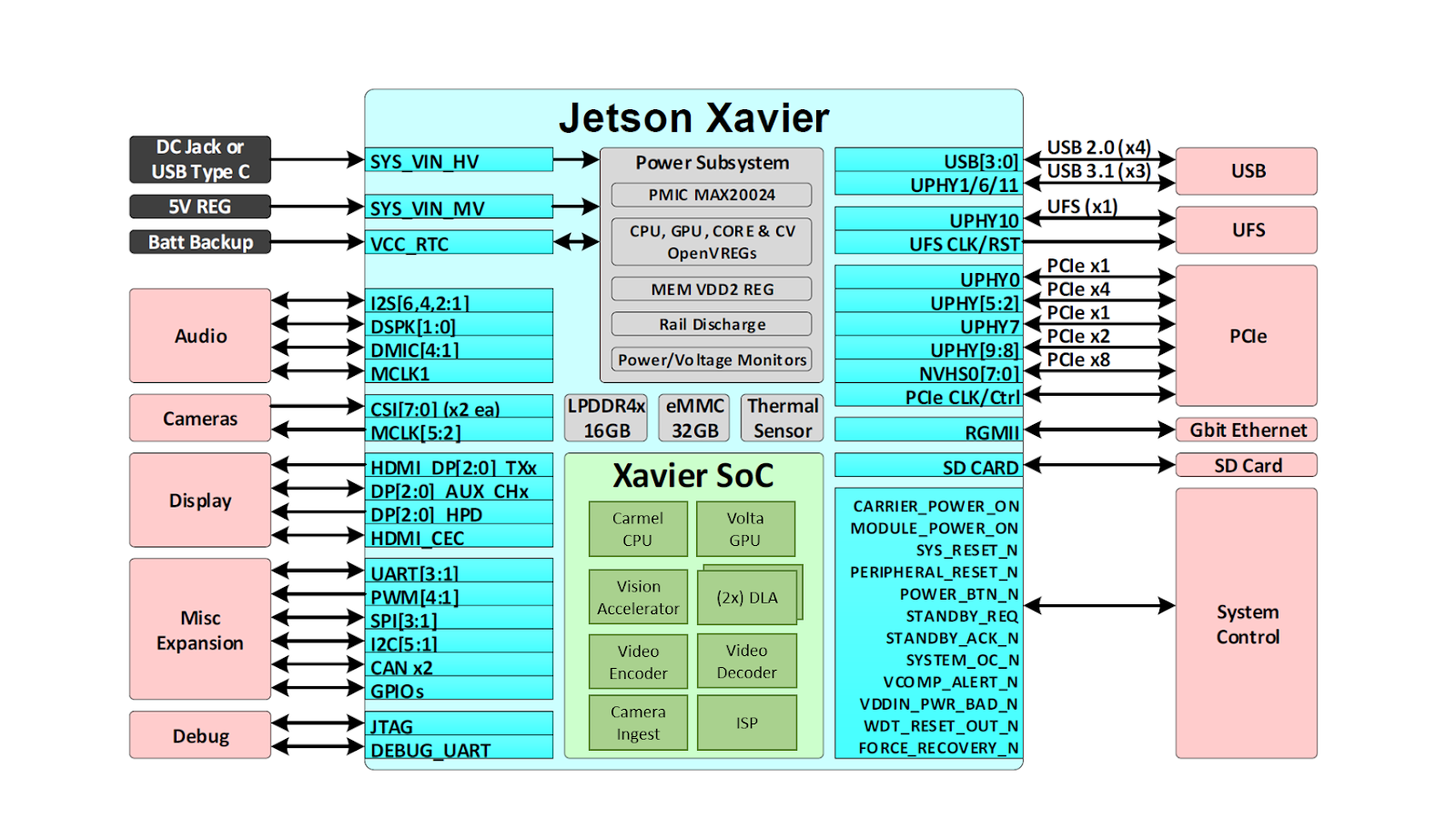
Jetson 通過深度學習和計算機視覺,為許多世界上最先進的機器人和自動機器提供人工智能,同時專注于性能、效率和可編程性。 Jetson AGX Xavier ,如圖 2 所示,由超過 90 億個晶體管組成,基于有史以來最復雜的片上系統( SoC )。該平臺包括集成的 512 核 NVIDIA Volta GPU ,包括 64?張量核?、 8 核 NVIDIA Carmel ARMv8 . 2 64 位 CPU 、 16GB 256 位 LPDDR4x 、雙 NVIDIA?深度學習加速器?( DLA )引擎、 NVIDIA 視覺加速器引擎、高清視頻編解碼器、 128Gbps 專用攝像頭攝取和 16 通道 PCIe Gen 4 擴展。 256 位接口上的內存帶寬為 137GB / s ,而 DLA 引擎減輕了深度神經網絡( DNNs )的推理任務。 NVIDIA 的 jetpacksdk4 . 1 . 1 適用于 Jetson AGX Xavier 的 jetpacksdk4 . 1 . 1 包括 CUDA 10 . 0 、 cuDNN 7 . 3 和 TensorRT 5 . 0 ,提供了完整的 AI 軟件棧。?
這使得開發者能夠在機器人、智能視頻分析、醫療儀器、嵌入式物聯網邊緣設備等應用中部署加速人工智能。和它的前輩 Jetson TX1 和 TX2 一樣, Jetson AGX Xavier 使用的是模塊上系統( SoM )范式。所有的處理都包含在計算模塊上,高速 I / O 通過高密度板對板連接器提供的分接載體或外殼上。以這種方式將功能封裝在模塊上,使開發人員能夠輕松地將 Jetson Xavier 集成到他們自己的設計中。 NVIDIA 發布了全面的 文檔 和參考設計文件,可供嵌入式設計師使用 Jetson AGX Xavier 創建自己的設備和平臺。請務必參考 Jetson AGX Xavier 模塊數據表 和 Jetson AGX Xavier OEM 產品設計指南 了解表 1 中列出的全部產品功能,此外還有 eleCTR 機械規范、模塊引腳輸出、電源順序和信號布線指南。
| ? | NVIDIA Jetson AGX Xavier Module |
| CPU | 8-core NVIDIA Carmel 64-bit ARMv8.2 @ 2265MHz |
| GPU | 512-core NVIDIA Volta @ 1377MHz with 64 TensorCores |
| DL | Dual NVIDIA Deep Learning Accelerators (DLAs) |
| Memory | 16GB 256-bit LPDDR4x @ 2133MHz | 137GB/s |
| Storage | 32GB eMMC 5.1 |
| Vision | (2x) 7-way VLIW Vision Accelerator |
| Encoder* | (4x) 4Kp60?| (8x) 4Kp30 | (16x) 1080p60 | (32x) 1080p30 Maximum throughput up to (2x) 1000MP/s – H.265 Main |
| Decoder* | (2x) 8Kp30 | (6x) 4Kp60 | (12x) 4Kp30 | (26x) 1080p60 | (52x) 1080p30 Maximum throughput up to (2x) 1500MP/s – H.265 Main |
| Camera? | (16x) MIPI CSI-2 lanes, (8x) SLVS-EC lanes; up to 6 active sensor streams and 36 virtual channels |
| Display | (3x) eDP 1.4 / DP 1.2 / HDMI 2.0 @ 4Kp60 |
| Ethernet | 10/100/1000 BASE-T Ethernet + MAC + RGMII interface |
| USB | (3x) USB 3.1 + (4x) USB 2.0 |
| PCIe?? | (5x) PCIe Gen 4 controllers | 1×8, 1×4, 1×2, 2×1 |
| CAN | Dual CAN bus controller |
| Misc I/Os | UART, SPI, I2C, I2S, GPIOs |
| Socket | 699-pin board-to-board connector, 100x87mm with 16mm Z-height |
| Thermals? | -25°C to 80°C |
| Power | 10W / 15W / 30W?profiles, 9.0V-20VDC input |
| *Maximum number of concurrent streams up to the aggregate throughput. Supported video codecs: H.265, H.264, VP9 Please refer to the Jetson AGX Xavier Module Data Sheet?§1.6.1 and §1.6.2 for specific codec and profile specifications. ?MIPI CSI-2, up to 40 Gbps in D-PHY V1.2 or 109 Gbps in CPHY v1.1 SLVS-EC, up to 18.4 Gbps ??(3x) Root Port + Endpoint controllers and (2x) Root Port controllers ?Operating temperature range, Thermal Transfer Plate (TTP) max junction temperature. |
|
Jetson AGX Xavier 包括超過 750Gbps 的高速 I / O ,為流式傳感器和高速外圍設備提供了超常的帶寬。它是最早支持 PCIe Gen 4 的嵌入式設備之一,在五個 PCIe Gen 4 控制器上提供 16 個通道,其中三個控制器可以在根端口或端點模式下運行。 16 個 MIPI CSI-2 通道可連接到 4 個 4 通道攝像頭、 6 個 2 通道攝像頭、 6 個 1 通道攝像頭,或這些配置的組合(最多 6 個攝像頭), 36 個虛擬通道允許使用流聚合同時連接更多攝像頭。其他高速 I / O 包括三個 USB 3 . 1 端口、 SLVS-EC 、 UFS 和用于千兆以太網的 RGMII 。開發者現在可以訪問 NVIDIA 的 JetPack 4 . 1 . 1 開發者預覽 軟件,用于 Jetson AGX Xavier ,如表 2 所示。開發者預覽版包括 Linux For Tegra ( L4T ) R31 . 1 Board Support Package ( BSP ),目標系統支持 Linux 內核 4 . 9 和 Ubuntu18 . 04 。在主機端, Jetpack4 . 1 . 1 支持 Ubuntu16 . 04 和 Ubuntu18 . 04 。
| NVIDIA JetPack 4.1.1 Developer Preview?Release | |
|---|---|
| L4T R31.0.1 (Linux K4.9) | Ubuntu 18.04 LTS aarch64 |
| CUDA Toolkit?10.0 | cuDNN?7.3 |
| TensorRT?5.0 GA | GStreamer 1.14.1 |
| VisionWorks?1.6 | OpenCV 3.3.1 |
| OpenGL 4.6 / GLES 3.2 | Vulkan 1.1 |
| NVIDIA Nsight Systems?2018.1 | NVIDIA Nsight Graphics?2018.6 |
| Multimedia API?R31.1 | Argus 0.97 Camera API |
Jetpack4 . 1 . 1 開發者預覽版允許開發者立即使用 Jetson AGX Xavier 開始產品和應用程序的原型制作,為生產部署做準備。 NVIDIA 將繼續對 JetPack 進行改進,并提供額外的功能增強和性能優化。請閱讀 發行說明 了解本版本的亮點和軟件狀態。
Volta GPU
如圖 3 所示, Jetson AGX Xavier 集成 Volta GPU 提供 512 個 CUDA 核和 64 個張量核心,可用于高達 11 TFLOPS FP16 或 22 個 INT8 compute 頂部,最大時鐘頻率為 1 . 37GHz 。它支持計算能力為 sm _的 CUDA 10 , GPU 包括 8 個 Volta 流式多處理器( sm ),每個 Volta sm 有 64 個 CUDA 核和 8 個張量核。每個 Volta SM 都包括一個 128KB 的 L1 緩存,比前幾代大 8 倍。 SMs 共享一個 512KB 的二級緩存,訪問速度比前幾代快 4 倍。
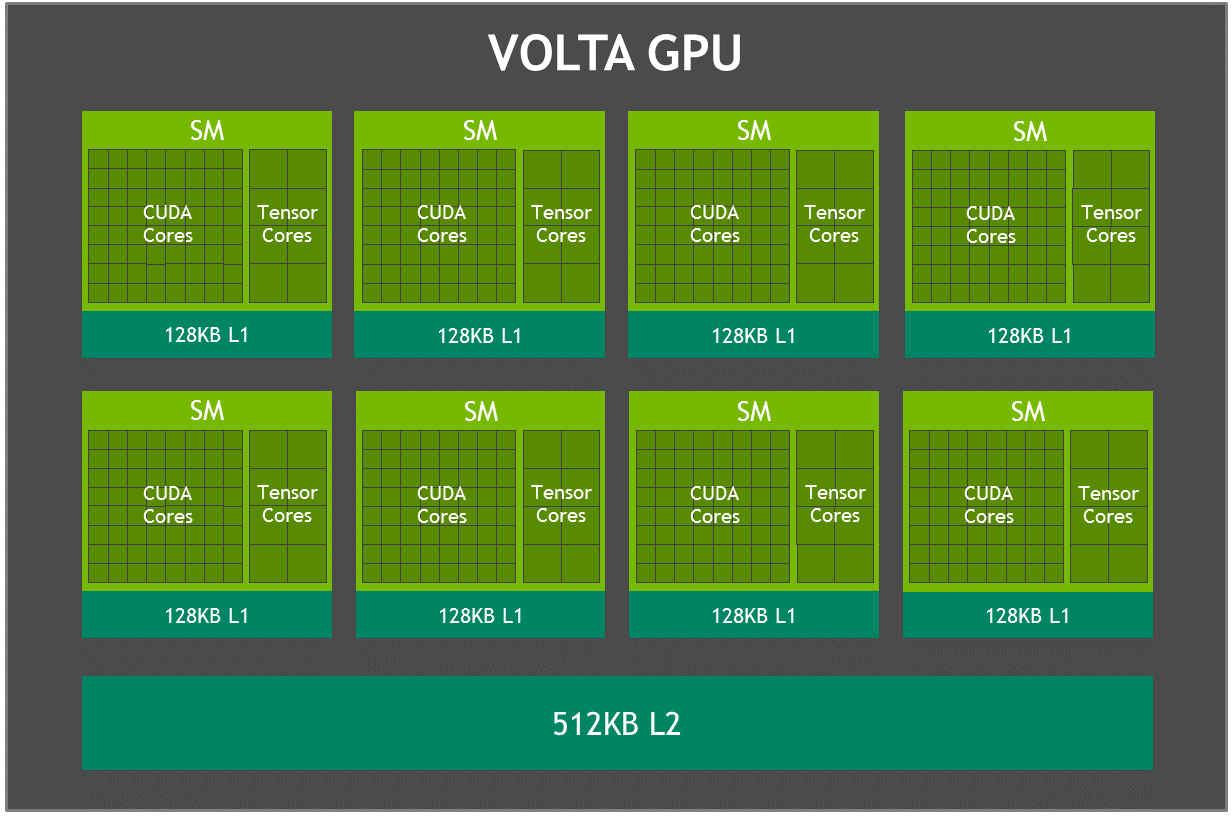
每個 SM 由 4 個獨立的處理塊組成,稱為 SMPs (流式多處理器分區),每個處理塊包括自己的 L0 指令緩存、 warp 調度器、調度單元和寄存器文件,以及 CUDA 內核和 Tensor 內核。每個 SM 的 smp 數量是 Pascal 的兩倍, Volta SM 的特點是改進了并發性,并且支持更多的線程、扭曲和線程塊。
張量核
NVIDIA 張量核心是可編程的融合矩陣乘法和累加單元,它們與 CUDA 核心并行執行。張量核實現了新的浮點 HMMA (半精度矩陣乘法和累加)和 IMMA (整數矩陣乘法和累加)指令,用于加速密集線性代數計算、信號處理和深度學習推理。
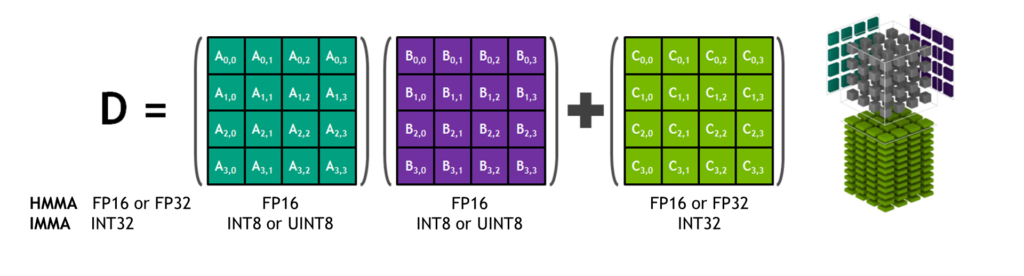
矩陣乘法輸入 A 和 B ? 是 HMMA 指令的 FP16 矩陣,而累加矩陣 C 和 D 可以是 FP16 或 FP32 矩陣。對于 IMMA ,矩陣乘法輸入 A 是有符號或無符號的 INT8 或 INT16 矩陣, B 是有符號或無符號的 INT8 矩陣, C ? 和 D 累加器矩陣都是有符號 INT32 。因此,精度和計算范圍足以避免內部積累期間的溢出和下溢情況。
NVIDIA 庫包括 cuBLAS 、 cuDNN 和 TensorRT 已被更新,以在內部利用 HMMA 和 IMMA ,使程序員能夠輕松地利用張量核固有的性能增益。用戶還可以通過在 wmma 名稱空間和 CUDA 10 中包含的 mma . h 頭文件中公開的新 API ,直接訪問 warp 級別的 Tensor 核心操作。 warp 級別的接口在每個 warp 的所有 32 個線程上映射 16 × 16 、 32 × 8 和 8 × 32 大小的矩陣。
深度學習加速器
Jetson AGX Xavier 具有兩個 NVIDIA 深度學習加速器 ( DLA )引擎,如圖 5 所示,它們減輕了固定函數卷積神經網絡( CNN )的推理。這些引擎提高了能源效率,并釋放了 GPU 來運行更復雜的網絡和用戶執行的動態任務。 NVIDIA DLA 硬件體系結構是開源的,可從 NVDLA . org 網站 獲得。每個 DLA 具有高達 5 個 TOP INT8 或 2 . 5 TFLOPS FP16 性能,功耗僅為 0 . 5-1 . 5W 。 DLA 支持加速 CNN 層,如卷積、反褶積、激活函數、最小/最大/平均池、本地響應規范化和完全連接層。
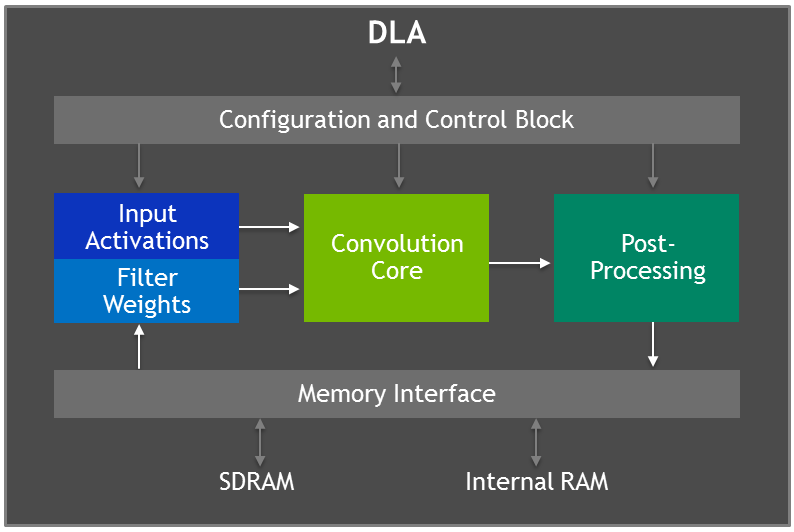
DLA 硬件由以下組件組成:
- 卷積核心 – 優化的高性能卷積引擎。
- 單數據處理器 – 激活功能的單點查找引擎。
- 平面數據處理器 – 用于池的平面平均引擎。
- 通道數據處理器–用于高級標準化功能的多通道平均引擎。
- 專用內存和數據整形引擎 – 用于張量整形和復制操作的內存到內存轉換加速。
開發人員使用 TensorRT 5 . 0 編程 DLA 引擎,在網絡上執行推斷,包括對 AlexNet 、 GoogleNet 和 ResNet-50 的支持。對于使用 DLA 不支持的層配置的網絡, TensorRT 為無法在 DLA 上運行的層提供 GPU 回退。 Jetpack4 . 0 開發者預覽版最初將 DLA 的精度限制在 FP16 模式,在未來的 JetPack 版本中, DLA 的 INT8 精度和更高的性能將會出現。
TensorRT 5 . 0 在其 IBuilder 接口中添加了以下 API 以啟用 DLA :
setDeviceType()和setDefaultDeviceType()用于選擇 GPU 、 DLA ? 0 或 DLA ? 1 以執行特定層,或默認情況下用于網絡中的所有層。canRunOnDLA()檢查層是否可以按配置在 DLA 上運行。getMaxDLABatchSize()用于檢索 DLA 可以支持的最大批處理大小。allowGPUFallback()使 GPU 能夠執行 DLA 不支持的層。
請參考 TensorRT 5 . 0 開發人員指南 的第 6 章,了解 TensorRT 中支持的層配置和使用 DLA 的代碼示例的完整列表。
深度學習推斷基準
我們已經為 GPU AGX Xavier 發布了 深度學習推斷基準結果 ,這些 dnn 包括 ResNet 、 GoogleNet 和 VGG 的變體。我們在 Jetson AGX Xavier 的 Jetson 和 DLA 引擎上使用 jetpack4 . 1 . 1 開發者預覽版 TensorRT 5 . 0 為 Jetson AGX Xavier 運行這些基準測試。 GPU 和兩個 dla 分別以 INT8 和 FP16 精度并行運行相同的網絡體系結構,并報告每個配置的總體性能。 GPU 和 dla 可以在現實世界的用例中同時運行不同的網絡或網絡模型,以并行方式或在處理管道中彼此并行地提供獨特的功能。在 TensorRT 中使用 INT8 與全 FP32 精度相比,會導致精度損失 1% 或更少。
首先,讓我們考慮一下 ResNet-18fcn ( Fully-compolutional Network )的結果,它是一個用于語義分割的 2048 × 1024 分辨率的全高清模型。分段為自由空間檢測和占用率映射等任務提供了每像素分類,并代表了由自主機器計算的用于感知、路徑規劃和導航的深度學習工作負載。圖 6 顯示了在 Jetson AGX Xavier 和 Jetson TX2 上運行 ResNet-18 FCN 的測量吞吐量。
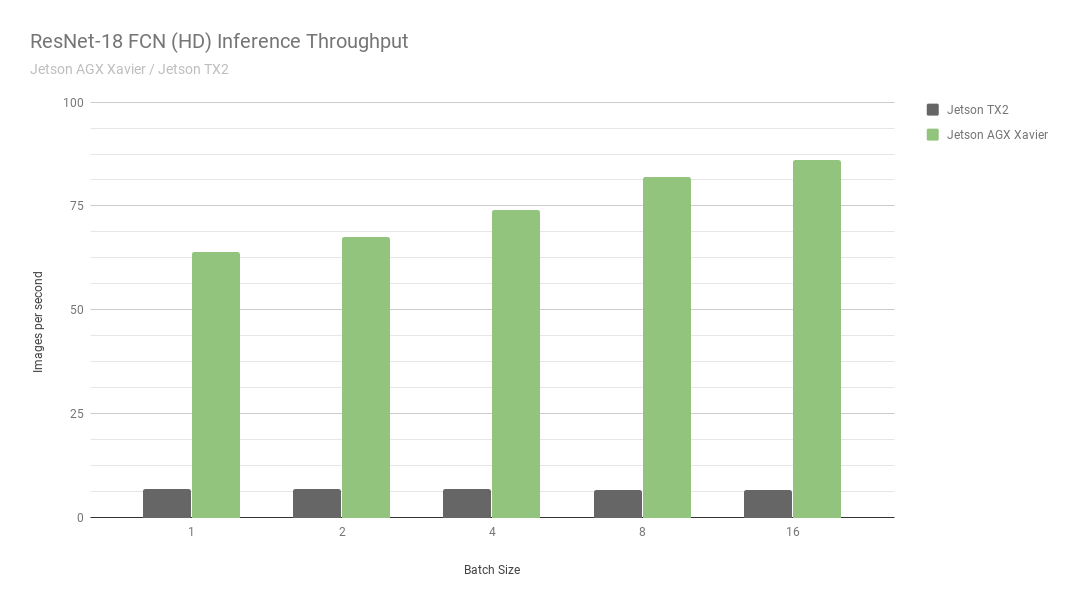
Jetson AGX Xavier 目前在 ResNet-18 FCN 推理中的性能是 Jetson TX2 的 13 倍。 NVIDIA 將繼續在 JetPack 中發布軟件優化和功能增強,隨著時間的推移,將進一步提高性能和功率特性。請注意, 基準結果 的完整列表報告了 Jetson AGX Xavier 的 ResNet-18 FCN 的性能,但在圖 7 中,我們只繪制了批量大小為 16 的 ResNet-18 FCN ,因為 Jetson TX2 能夠運行 ResNet-18 FCN ,最大批量為 16 。
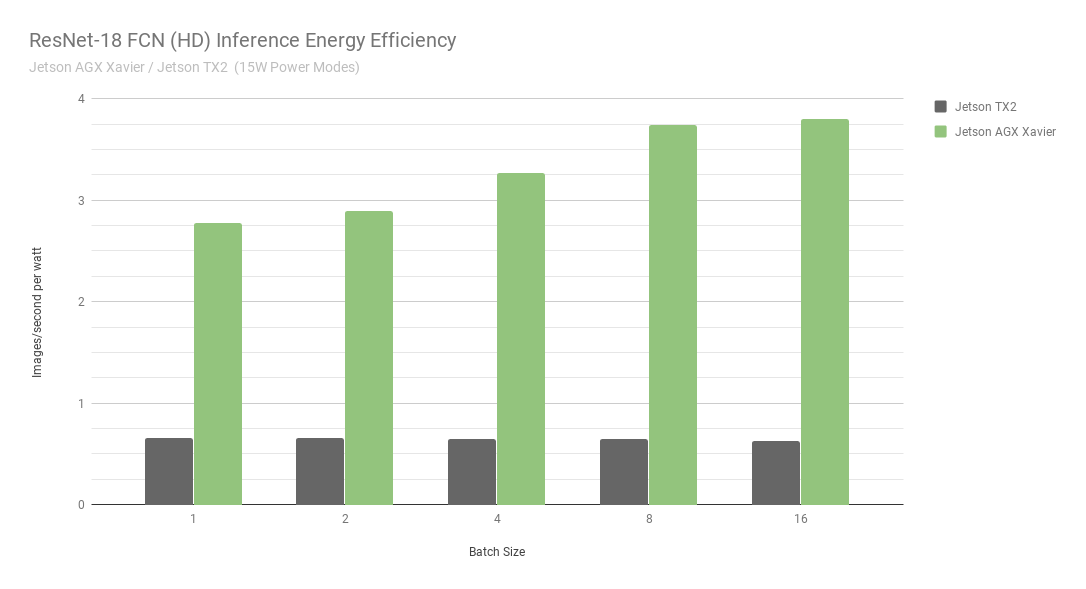
當考慮使用每秒處理的每瓦特圖像的能效時, Jetson AGX Xavier 目前比 ResNet-18 FCN 的 Jetson TX2 高 6 倍。我們通過使用板載 INA 電壓和電流監測器測量總模塊功耗來計算效率,包括 CPU 、 GPU 、 DLA 、內存、其他 SoC 功率、 I / O 和所有軌道上的調節器效率損失。兩臺 Jetson 都在 15W 電源模式下運行。 Jetson AGX Xavier 和 JetPack 飛船,具有 10W 、 15W 和 30W 的可配置預設功率配置文件,可在運行時使用 nvpmodel 電源管理工具進行切換。用戶還可以使用不同的時鐘和 DVFS (動態電壓和頻率縮放)調速器設置來定義自己的自定義配置文件,這些設置已經過定制,以實現單個應用的最佳性能。
接下來,讓我們比較一下圖像識別網絡 ResNet-50 和 VGG19 上的 Jetson AGX Xavier 基準測試,這些基準測試的批量大小從 1 到 128 與 Jetson TX2 。這些模型對分辨率為 224 × 224 的圖像塊進行分類,常用作各種目標檢測網絡中的編碼器主干。在較低分辨率下使用 8 或更高的批處理大小可用于近似處理較高分辨率下批大小為 1 的性能和延遲。機器人平臺和自主機器通常包含多個攝像機和傳感器,除了執行感興趣區域( ROI )的檢測,然后分批對 ROI 進行進一步分類,這些攝像頭和傳感器可以批量處理以提高性能。圖 8 還包括對 Jetson AGX Xavier 未來性能的估計,包括軟件增強功能,如 INT8 對 DLA 的支持和 GPU 的其他優化。
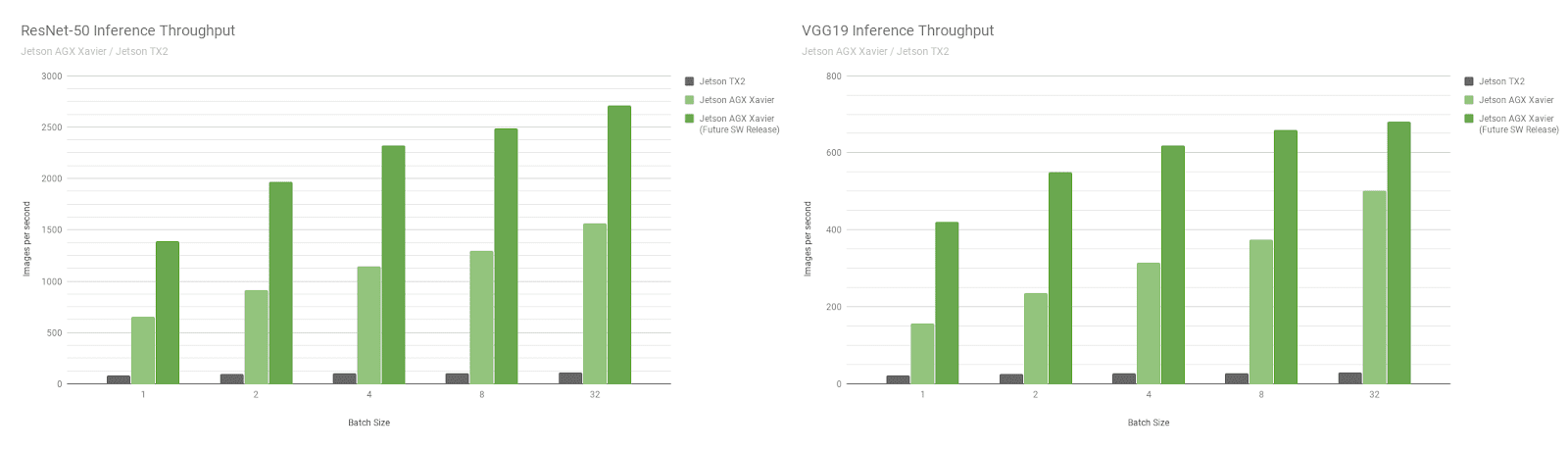
Jetson AGX Xavier 目前在 VGG19 上的 Jetson TX2 和 ResNet-50 上的吞吐量分別達到 18 倍和 14 倍,如圖 9 所示。延遲為 65 . 5 秒,或凈大小為 65 . 5 秒/秒。隨著未來軟件的改進, Jetson AGX Xavier 預計將比 Jetson TX2 快 24 倍。請注意,對于遺留比較,我們還提供了完整的 性能列表 中的 GoogleNet 和 AlexNet 的數據。
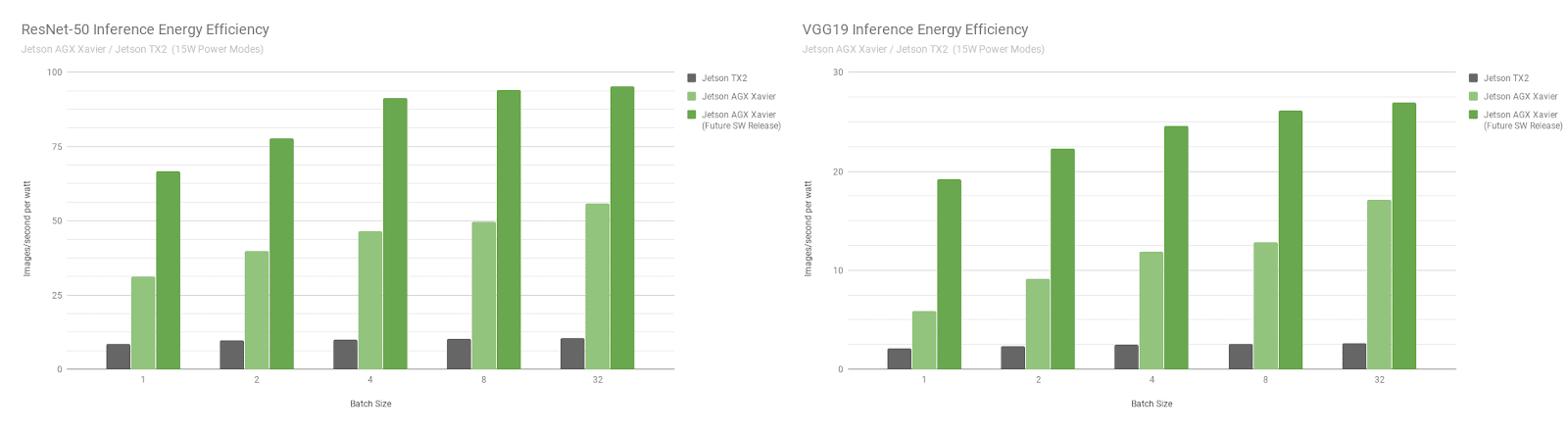
Jetson AGX Xavier 目前在 VGG19 推理方面的效率比 Jetson TX2 高 7 倍多,使用 ResNet-50 的效率高 5 倍,考慮到未來的軟件優化和增強,效率提高了 10 倍。參考完整的 績效結果 來獲取更多的數據和關于推斷基準的細節。我們還將在下一節中對 CPU 的性能進行基準測試。
卡梅爾 CPU 復合體
圖 10 所示的 Jetson AGX Xavier 的 CPU 復合體由四個基于 ARMv8 . 2 的異構雙核 NVIDIA CarmelCPU 簇組成,最大時鐘頻率為 2 . 26GHz 。每個核心包括 128KB 指令和 64KB 數據一級緩存,以及兩個內核之間共享的 2MB 二級緩存。 CPU 集群共享一個 4MB 的 L3 緩存。