在 ROSCon 2022 上, NVIDIA 發布了最新的 Isaac ROS 軟件版本 Developer Preview ( DP ) 2 。該版本包括用于自主移動機器人( AMR )車隊的新的云和邊緣到機器人任務管理和監控軟件,以及 ROS 2 開發者的附加功能。
NVIDIA ISAAC ROS 由單個軟件包( GEM )和完整的流水線( NITROS )組成,可實現硬件加速性能。除了性能改進之外,新版本還添加了以下功能:
- 任務調度和客戶: 一個開源的 CPU 包,用于從車隊管理系統向機器人分配和監控任務。任務調度是一種云原生微服務,可以作為大型車隊管理系統的一部分進行集成。
- FreeSpace Segmentation: 一種硬件加速包,用于在機器人附近生成基于視覺 AI 的占用網格,用作導航堆棧的輸入。
- H 、 264 視頻編碼和解碼: 用于壓縮視頻數據記錄和回放的硬件加速包。視頻數據采集是訓練人工智能感知模型的重要組成部分。 NVIDIA Jetson AGX Orin 平臺上的這些新 GEM 的性能以 2 倍 1080p 立體相機以 30 fps (總共超過 120 fps )的速度測量,數據占用減少了約 10 倍。
任務調度和客戶
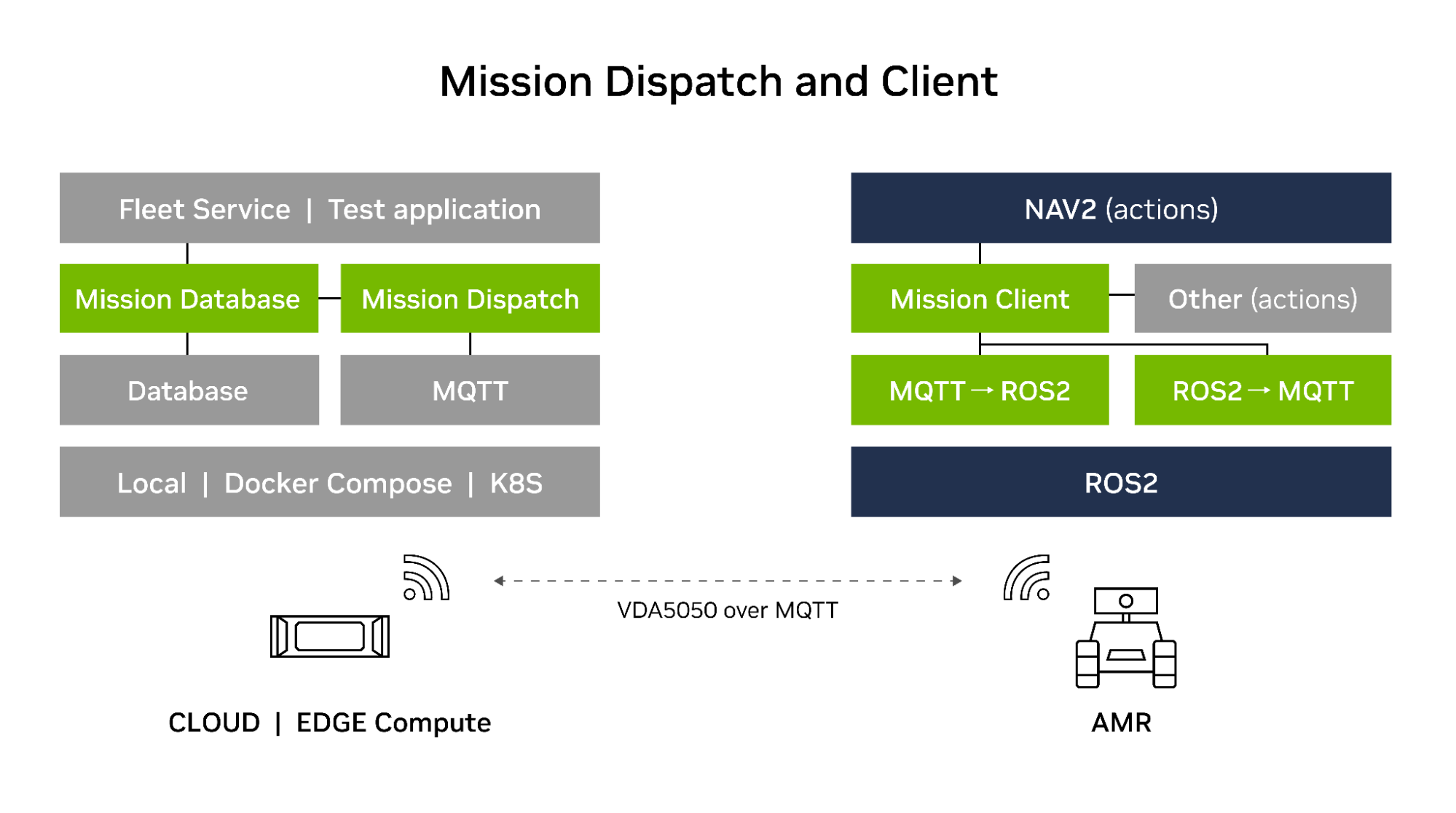
Mission Dispatch 和 Client 為車隊管理系統和 ROS 2 機器人之間分配和跟蹤任務提供了一種標準的開源方式。調度和客戶端使用 VDA5050 進行通信,這是專為機器人車隊設計的開放式通信標準。消息通過 MQTT 無線傳輸,這是物聯網( IoT )應用的輕量級消息協議。
任務調度是一種容器化微服務,可 從 NGC 下載 ,或作為 NVIDIA ISAAC GitHub 存儲庫上的源代碼,可集成到車隊管理系統中。任務調度已被驗證可與其他開源 ROS 2 客戶端進行互操作,如最近宣布的由 OTTO Motors 和 InOrbit 開發的 VDA5050 Connector 。
與 ROS 2 Humble 兼容的 Mission Client 作為 NVIDIA ISAAC ROS GitHub 存儲庫中的一個包提供,并與 Nav2 導航堆棧預集成,以分配和跟蹤機器人上的導航和其他任務。
OTTO 汽車公司首席技術官 Ryan Gariepy 表示:“隨著移動機器人在現實世界中的部署速度加快,互操作性變得越來越重要。”。“作為一個開源社區,將 VDA5050 與 ROS2 連接起來,將促進車隊管理解決方案的創新,同時讓機器人制造商專注于差異化。”
NVIDIA ISAAC ROS 性能
NVIDIA ISAAC ROS 繼續為 ROS 2 開發者社區提供用于 AI 感知、圖像處理和導航的硬件加速性能。自主機器人需要先進的人工智能和計算機視覺能力。 ISAAC ROS 代表了我們致力于讓機器人社區更容易采用這些尖端技術的承諾。
有關關鍵 ISAAC ROS 包的最新性能數據的更多信息,請參閱 Isaac ROS Performance Summary 。

為 ROS 2 開發者提供免費培訓
為了向 NVIDIA ISAAC ROS 專家提供高級技術培訓和訪問, NVIDIA 宣布了一系列針對 ROS 2 開發人員的新網絡研討會。這些會議是免費的,并設有問答環節,由技術專家為 ROS2 開發加速模塊。
前三個網絡研討會主題:
- November 14, 2022: 精確定位, 250 fps ,使用 Jetson 上的 vSLAM 進行 ROS 2 本地化 ,由 Raffaello Bonghi 博士領導。
- December 2022: 任務調度和客戶: ,由赫馬爾·沙阿領導
- December 2022: FreeSpace Segmentation: ,由 Asawaree Bandhi 領導
Register for the November 14 webinar 并很快返回,因為更多的網絡研討會將添加到該系列中。
ROSCon 2022 年
如果您正在日本京都參加 ROSCon ,請務必參加技術會議 gz-omni: Bridging Gazebo with Isaac Sim (直播)于 2022 年 10 月 20 日下午 2 : 10 JST 播出。訪問 NVIDIA 第 22 號展位,觀看 NVIDIA ISAAC ROS 在 NVIDIA Jetson AGX Orin 開發套件上運行的現場演示。
開始使用
要立即開始使用 NVIDIA ISAAC ROS ,請查看 /NVIDIA-ISAAC-ROS GitHub 存儲庫中總結的示例。
?