無論是突然加塞(cut-in),還是無意地 U 形掉頭,人類駕駛員的行為通常難以預測。行為的不可預測性源自人類決策過程的天然復雜性, 往往受多種因素的影響,而且在不同的運行設計域(ODD)和國家也會有所不同,因此很難在仿真中模擬駕駛行為。
但自動駕駛汽車(AV)的開發人員需要有把握地開發和部署能夠在不同 ODD 環境以及多樣的交通行為下運行的駕駛系統。NVIDIA Research 團隊最近發表的論文 BITS: Bi-Level Imitation for Traffic Simulation 中概述了一種仿真現實世界交通行為的新方法,該方法可以幫助開發人員做到這一點。
交通仿真 Bi-Level 模仿(BITS)是一種交通模型,該模型能夠以驚人的逼真度還原現實世界的復雜性,而且性能超過了以往的方法。在該論文詳細介紹的一個試驗中,BITS 的覆蓋范圍和多樣性較性能次佳的模型分別提高了 64% 和 118%,失敗率降低了 36%。
圖 1. BITS 通過解耦交通模型構建過程,實現更加逼真的交通仿真
構建交通模型所面臨的挑戰
大多數仿真工具通過回放原始記錄的數據或使用預定義的基于規則的交通系統來建模交通模型,以表達車輛行為。
雖然回放(數據)可以準確的查看和測試實際駕駛中遇到的特定場景,但卻很難仿真記錄之外的行為。另一方面,基于規則的控制器只能仿真簡單的行為,無法準確仿真更復雜的情況。
除此之外,基于學習的方法,在現實世界的駕駛日志上訓練而成,可生成逼真的未來軌跡。雖然這些模型已被證明能夠有效創建準確、動態的駕駛路徑,但它們很難生成多元的遵守道路邊界以及有其他智能體參與的軌跡。
BITS 將 AI 模型解耦成高級意圖理解和用來實現意圖的 Low-level 控制器。通過這種方式,該模型能夠合成與現實世界行為十分相似的各種交通模式,還能生成特定的場景。
在與其他 AI 加持的交通模型一起運行時,BITS 可以在保持低失敗率的情況下,持續展示出多樣的交通模式(圖 2)。

圖 2. BITS 的覆蓋范圍和多樣性水平最高,失敗率最低
BITS 方法
BITS 能達到高保真度和多樣性,要歸功于其層次化的模型結構。
該模型的兩個分支均基于現實世界的交通日志上訓練而成。High-level 分支用于預測車輛的潛在目標,Low-level 分支用于生成實現潛在目標的策略。通過任務分解,從而將為不同軌跡建模的任務交給 High-level 分支,而目標導向的 Low-level 策略生成能夠更加高效地運行。
BITS 還包含一個預測與規劃模塊,有助于在新環境和大跨度的時間內穩定模型表現。為此,該模塊會評估模型的可能軌跡并選擇那些遵循合理駕駛行為規則的軌跡,降低了偏離合理行為的風險。
評估 BITS 的質量
確定一個交通模型的表現是否真實,以及其是否能生成準確的、未見過的新場景本身就很困難。因為并沒有真值可做直接比較。因此,評估 BITS 交通模型本身就具有挑戰性。
正如 BITS: Bi-Level Imitation for Traffic Simulation 中所詳細介紹的,研究人員進行了三個層面的評估:試運行指標(覆蓋范圍、多樣性和失敗率)、與真實世界相比的統計差異以及與人類駕駛員的相似度。
第一個層面的評估直接衡量 Low-Level 分支的覆蓋范圍、每次運行的多樣性以及碰撞或偏離道路的駕駛事故的頻率。第二個層面的評估將仿真環境里的汽車速度和加速度差異與真實世界的數據進行比較。第三個層面的評估通過與預測模型比較來衡量行為是否與人類駕駛員相似,該預測模型可預測智能體在給定時刻的位置。
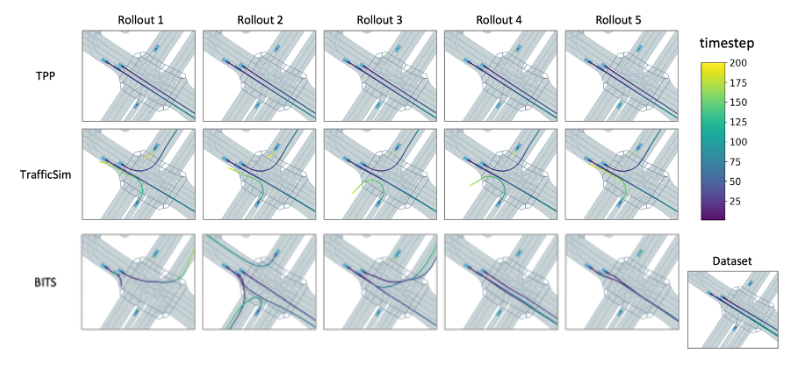
圖 3. 比較各種基于學習的交通模型所規劃的軌跡
如圖 2 和圖 3 所示,其他模型在生成多樣化軌跡和陷入重復行為之間作出權衡,而 BITS 每次都繪制出新的場景,且失敗率較低。
總結
在仿真中模仿現實交通行為的能力對于開發強大的自動駕駛技術至關重要。通過優化保真度和多樣性,BITS 使 AI 生成的交通仿真更加接近真實世界的復雜程度。NVIDIA 的目標是進一步開發和完善 BITS,并最終將其集成到 NVIDIA DRIVE Sim 的生產管線中。
歡迎業界在仿真流程中使用該工作并參與貢獻,已在 GitHub 上開源。NVIDIA 還在構建并開源 trajdata,該軟件工具能夠統一不同自動駕駛數據集的數據格式,并將現有數據集中的場景轉換成交互式仿真環境。