<xmp id="om0om">
<td id="om0om"></td>
<table id="om0om"><noscript id="om0om"></noscript></table>
DEVELOPER
首頁
博客
論壇
論壇 (英文)
文檔
下載
培訓
Search
Join
機器人學
2025年 4月 25日
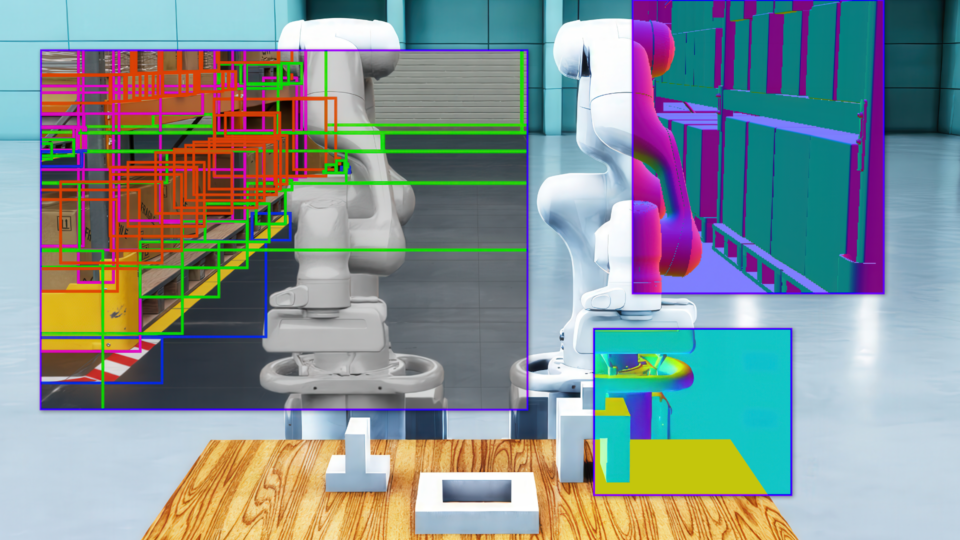
R2D2:利用 NVIDIA 研究工作流程和模型提升靈巧機器人的適應性
如今,Robotic arms 用于組裝、包裝、檢查等更多應用領域。但是,它們仍然經過預編程,可以執行特定的、通常是重復性的任務。
2 MIN READ
R2D2:利用 NVIDIA 研究工作流程和模型提升靈巧機器人的適應性
2025年 4月 11日
使用 NVIDIA NIM 管理科學文獻中的生物研究成果
科學論文多種多樣,通常為同一實體使用不同的術語,使用不同的方法來研究生物現象,并在不同的上下文中展示研究結果。
2 MIN READ
使用 NVIDIA NIM 管理科學文獻中的生物研究成果
2025年 3月 31日
工業設施數字孿生中的機器人仿真
工業企業正在采用 物理 AI 和自主系統來實現運營轉型。這涉及在工廠和倉庫中部署異構機器人車隊,包括移動機器人、 人形助手 、
2 MIN READ
工業設施數字孿生中的機器人仿真
2025年 3月 27日
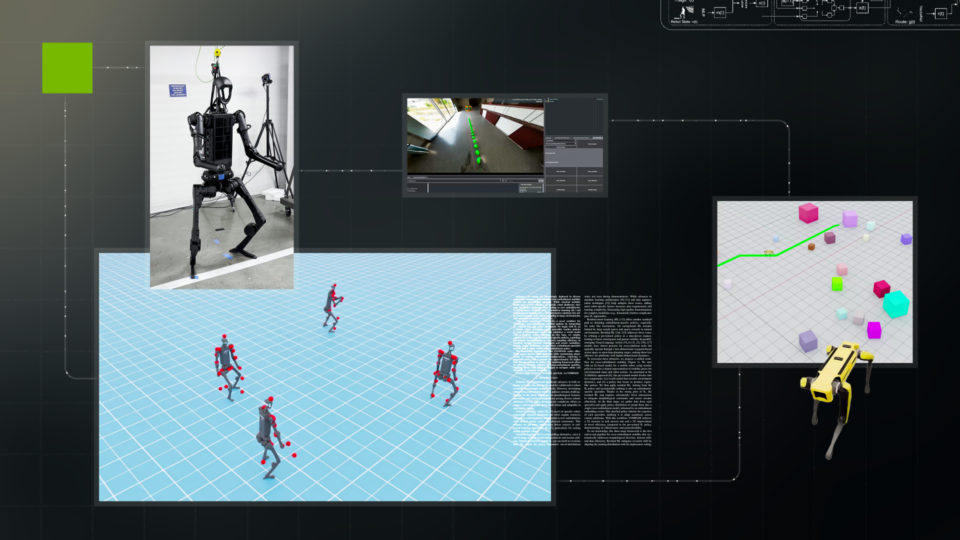
R2D2:利用 NVIDIA 研究中心的新型工作流和 AI 基礎模型,提升機器人的移動和全身控制能力
歡迎閱讀首期“NVIDIA 機器人研究與開發摘要(R²D²)”。
3 MIN READ
R2D2:利用 NVIDIA 研究中心的新型工作流和 AI 基礎模型,提升機器人的移動和全身控制能力
2025年 3月 20日
使用 NVIDIA Holoscan 3.0 中的動態流控制輕松構建邊緣 AI 應用
NVIDIA 在 GTC 2025 上宣布推出實時 AI 傳感器處理平臺 NVIDIA Holoscan 3.0 。
1 MIN READ
使用 NVIDIA Holoscan 3.0 中的動態流控制輕松構建邊緣 AI 應用
2025年 3月 18日
人形機器人學習的合成運動生成管道構建
通用人形機器人需要能夠快速適應現有的以人類為中心的城市和工業工作空間,處理繁瑣、重復或體力要求高的任務。這些移動機器人經過設計,
2 MIN READ
人形機器人學習的合成運動生成管道構建
2025年 3月 18日
構建人形機器人學習的合成運動生成流程
通用人形機器人需要能夠快速適應現有的以人類為中心的城市和工業工作空間,處理繁瑣、重復或體力要求高的任務。這些移動機器人經過設計,
2 MIN READ
構建人形機器人學習的合成運動生成流程
2025年 3月 18日
加速通用人形機器人的開發:NVIDIA Isaac GR00T N1
人形機器人需要能夠適應人類工作空間,處理重復性或高強度任務。然而,為真實世界的任務和不可預測的環境創建通用人形機器人是一項挑戰。通常來說,
2 MIN READ
加速通用人形機器人的開發:NVIDIA Isaac GR00T N1
2025年 3月 18日
使用 NVIDIA Cosmos 世界基礎模型擴展合成數據和物理 AI 推理
人形機器人和自動駕駛汽車等新一代 AI 機器人依賴于高保真、物理感知的訓練數據 。如果沒有多樣化且具有代表性的數據集,
2 MIN READ
使用 NVIDIA Cosmos 世界基礎模型擴展合成數據和物理 AI 推理
2025年 3月 18日
NVIDIA 推出用于機器人仿真的開源物理引擎 Newton
物理 AI 模型使機器人能夠自主感知、解釋、推理現實世界并與之交互。加速計算和仿真是開發新一代機器人的關鍵。
1 MIN READ
NVIDIA 推出用于機器人仿真的開源物理引擎 Newton
2025年 3月 18日
使用 OpenUSD 實現模塊化和可擴展的機器人仿真和開發
在 物理 AI 飛速發展的推動下 ,機器人領域正在經歷重大變革。這一演變加快了新機器人解決方案的上市時間,增強了人們對其安全能力的信心,
2 MIN READ
使用 OpenUSD 實現模塊化和可擴展的機器人仿真和開發
2025年 3月 18日
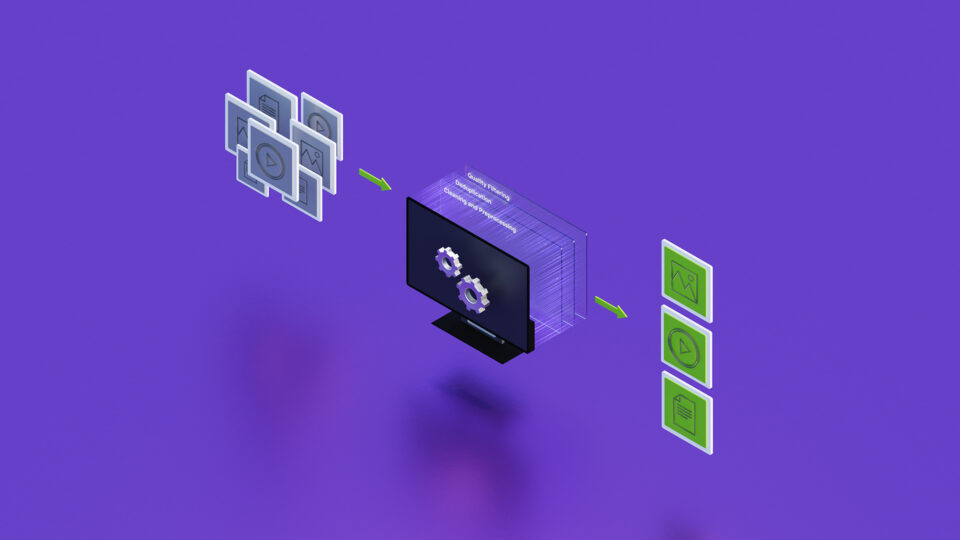
在 NVIDIA DGX 云上使用 NVIDIA NeMo Curator 處理 PB 級視頻
隨著 物理 AI 的興起,視頻內容生成呈指數級增長。一輛配備攝像頭的自動駕駛汽車每天可生成超過 1 TB 的視頻,
3 MIN READ
在 NVIDIA DGX 云上使用 NVIDIA NeMo Curator 處理 PB 級視頻
2025年 3月 18日
隆重推出 NVIDIA Isaac 醫療健康版:一款 AI 驅動的醫療機器人開發平臺
醫療科技的未來是機器人,醫院將實現完全自動化,AI 驅動的手術系統、機器人助手和自主患者護理將改變我們所知的醫療保健行業。
3 MIN READ
隆重推出 NVIDIA Isaac 醫療健康版:一款 AI 驅動的醫療機器人開發平臺
2025年 3月 12日
輕量級、多模態、多語種 Gemma 3 模型實現性能優化
使用基礎模型構建 AI 系統需要在內存、延遲、存儲、計算等資源之間實現微妙的平衡。在將生成式 AI 功能引入快速發展的 AI 應用生態系統時,
1 MIN READ
輕量級、多模態、多語種 Gemma 3 模型實現性能優化
2025年 2月 26日
圖像和視頻理解的視覺語言模型提示工程實踐指南
視覺語言模型 (VLMs) 正在以極快的速度發展。2020 年,首批 VLMs 通過使用視覺編碼器將視覺理解引入大語言模型 (LLMs) ,
4 MIN READ
圖像和視頻理解的視覺語言模型提示工程實踐指南
2025年 2月 20日
NVIDIA GTC 2025 上的人工智能促進氣候、能源和生態系統復原力
從減緩氣候變化到改進災害響應和環境監測,AI 正在重塑我們應對重大全球挑戰的方式。快速、高分辨率的氣候預報、
1 MIN READ
NVIDIA GTC 2025 上的人工智能促進氣候、能源和生態系統復原力
加載更多
人人超碰97caoporen国产
Search
Join
首頁
博客
論壇
論壇 (英文)
文檔
下載
培訓