<xmp id="om0om">
<td id="om0om"></td>
<table id="om0om"><noscript id="om0om"></noscript></table>
DEVELOPER
首頁
博客
論壇
論壇 (英文)
文檔
下載
培訓
Search
Join
3 月 19 日下午 2 點,鎖定 NVIDIA AI 網絡中文專場。
立即注冊觀看
DRIVE
2025年 3月 10日
借助 NVIDIA DriveOS LLM SDK 簡化自動駕駛汽車應用的 LLM 部署
大語言模型 (LLMs) 在自然語言處理 (NLP) 中表現出非凡的泛化能力。它們廣泛應用于翻譯、數字助理、推薦系統、上下文分析、代碼生成、
2 MIN READ
借助 NVIDIA DriveOS LLM SDK 簡化自動駕駛汽車應用的 LLM 部署
2025年 1月 9日
NVIDIA Cosmos World 基礎模型平臺助力物理 AI 進步
隨著機器人和 自動駕駛汽車 的發展,加速 物理 AI 的發展變得至關重要,而物理 AI 使自主機器能夠感知、理解并在現實世界中執行復雜的操作。
4 MIN READ
NVIDIA Cosmos World 基礎模型平臺助力物理 AI 進步
2024年 10月 23日
使用 PVA 引擎優化自動駕駛汽車 CV 開發流水線
在汽車軟件開發領域,越來越多的大規模 AI 模型被集成到自動駕駛汽車中,這些模型的范圍從視覺 AI 模型到用于自動駕駛的端到端 AI 模型。
4 MIN READ
使用 PVA 引擎優化自動駕駛汽車 CV 開發流水線
2024年 1月 29日
使用全卷積網絡在 Transformer 模型中模擬注意力機制
在過去十年中,深度學習技術在計算機視覺 (CV) 任務中的應用大幅增加。卷積神經網絡 (CNN) 一直是這場革命的基石,展示了卓越的性能,
3 MIN READ
使用全卷積網絡在 Transformer 模型中模擬注意力機制
2023年 11月 13日
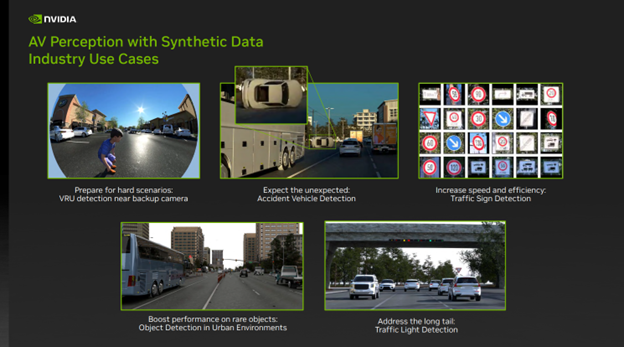
使用合成數據處理自動駕駛汽車感知
自動駕駛汽車 (AV) 有各種形狀和大小,從小型客車到多軸半掛卡車不等。但是,部署在這些車輛上的感知算法必須經過訓練,以處理類似情況,
2 MIN READ
使用合成數據處理自動駕駛汽車感知
2023年 9月 26日
驗證 NVIDIA DRIVE Sim 雷達模型
傳感器模擬是解決自動駕駛汽車(AV)開發中現實世界數據差距的關鍵工具。然而,只有傳感器模型準確地反映了物理世界,它才有效。
4 MIN READ
驗證 NVIDIA DRIVE Sim 雷達模型
2023年 7月 12日
基于早期網格融合的近距離障礙物感知
自動泊車輔助系統在感知障礙物時必須克服一些獨特的挑戰。目標車輛包含感知車輛周圍環境的傳感器。在停車過程中,
1 MIN READ
基于早期網格融合的近距離障礙物感知
2023年 5月 18日
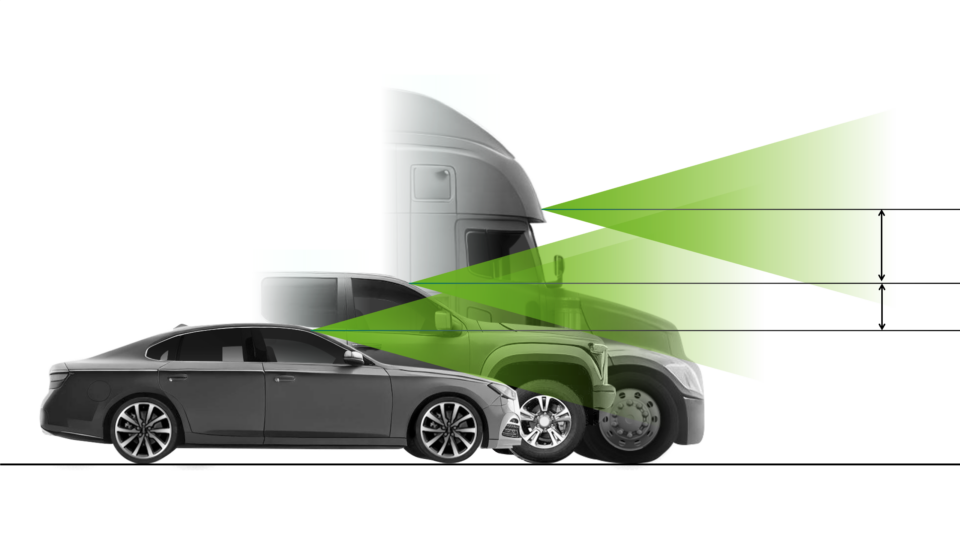
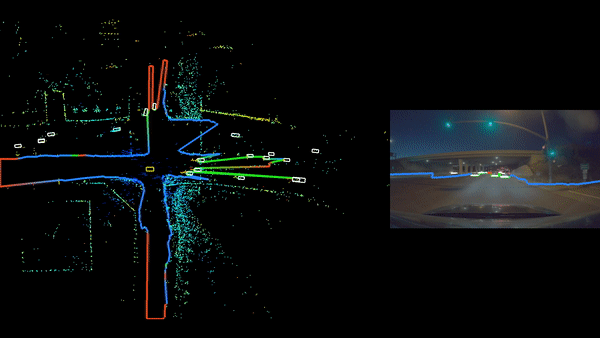
利用合成數據聚焦遠場物體,實現基于攝像頭的 AV 感知
檢測遠場物體,如 100 米以外的車輛,是自動駕駛系統在高速公路上安全操作的基礎 在這樣的高速環境中,每一秒都很重要。因此,
2 MIN READ
利用合成數據聚焦遠場物體,實現基于攝像頭的 AV 感知
2023年 3月 13日
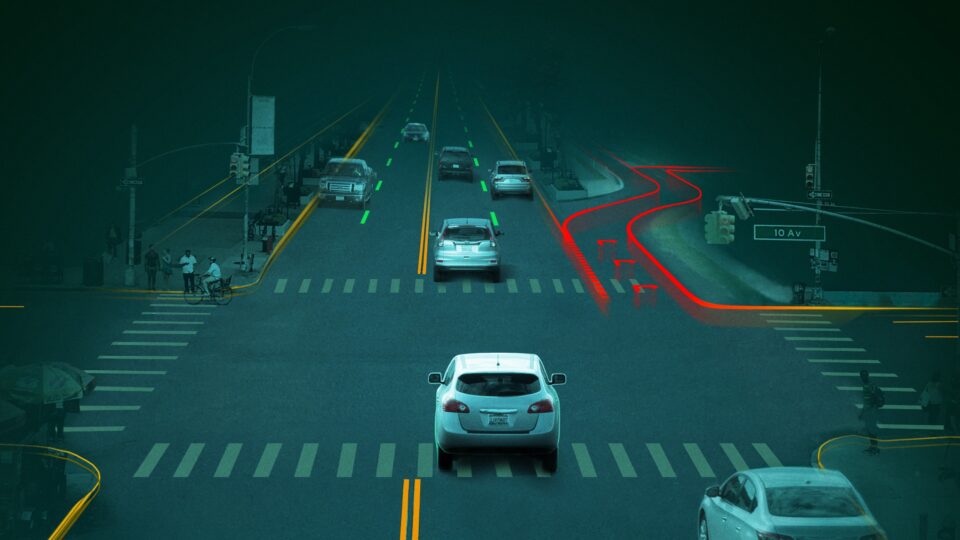
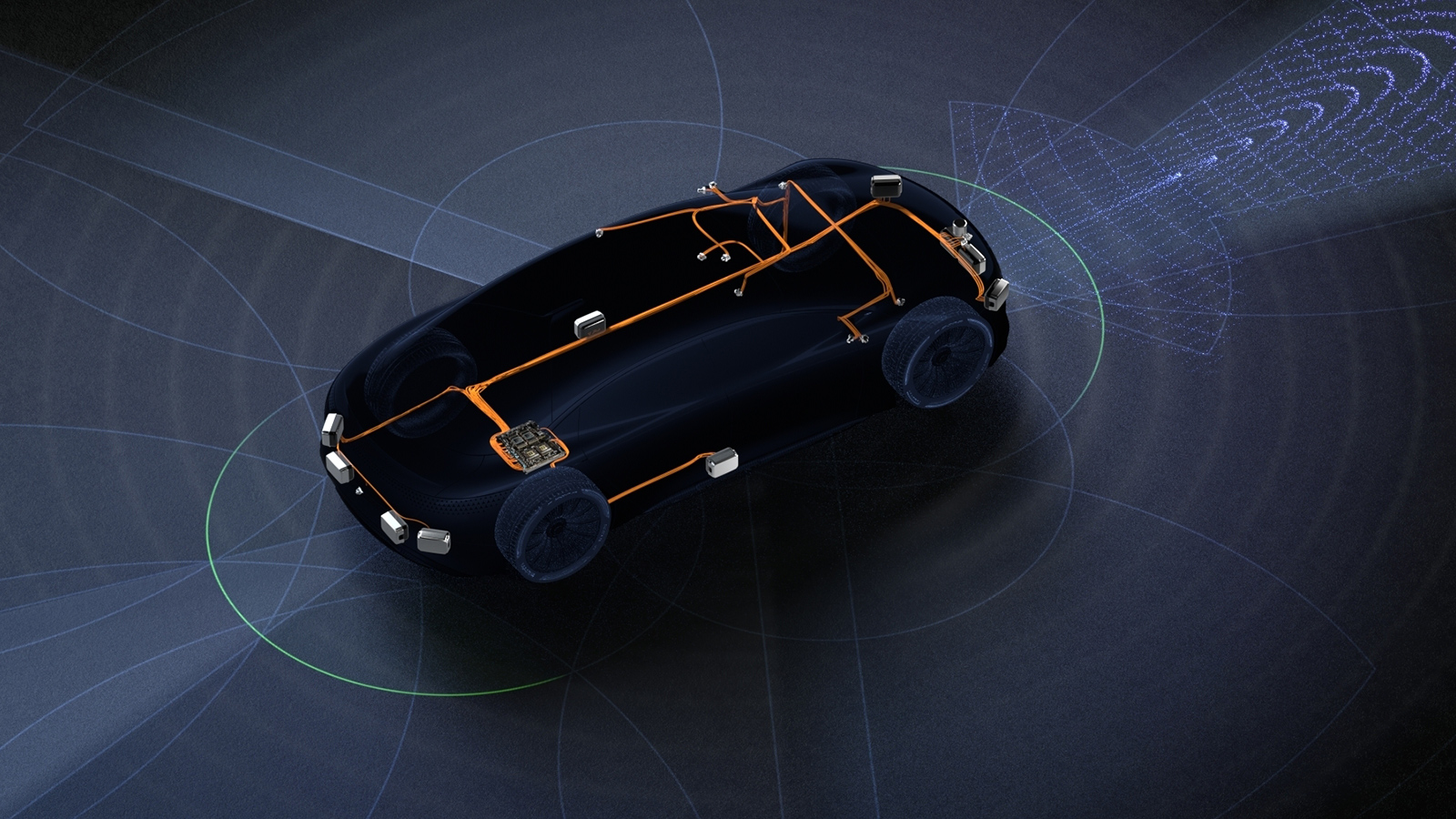
利用雷達網探測障礙物和可行駛自由空間
檢測可駕駛自由空間是高級駕駛員輔助系統( ADAS )和自動駕駛汽車( AV )感知的關鍵組成部分。
2 MIN READ
利用雷達網探測障礙物和可行駛自由空間
2023年 2月 23日
基于 AI 的自動駕駛汽車潛在事故場景生成
自動駕駛汽車( AVs )必須能夠安全地處理現實世界中可能遇到的任何類型的交通場景。這包括危險的近距離事故,
2 MIN READ
基于 AI 的自動駕駛汽車潛在事故場景生成
2023年 1月 20日
驗證 NVIDIA DRIVE Sim 中的
主動傳感器
自動駕駛汽車的發展與規模有關。工程師必須收集并標記大量數據,以訓練自動駕駛神經網絡。 然后,這些數據被用于測試和驗證 AV 系統,
1 MIN READ
驗證 NVIDIA DRIVE Sim 中的
主動傳感器
2022年 11月 8日
一文看懂DRIVE Replicator:合成數據生成加速自動駕駛汽車的開發和驗證
在9月舉行的GTC大會上,NVIDIA產品經理Gautham Sholingar以《合成數據生成:加速自動駕駛汽車的開發和驗證》為題,
3 MIN READ
一文看懂DRIVE Replicator:合成數據生成加速自動駕駛汽車的開發和驗證
2022年 10月 28日
了解自動駕駛汽車
未來是自主的,人工智能已經在改變交通行業。但什么是自動駕駛汽車,它是如何工作的? 自動駕駛汽車誕生于數據中心。它們需要傳感器、高性能硬件、
1 MIN READ
了解自動駕駛汽車
2022年 9月 21日
GTC 推出新語言、增強網絡安全和醫療 AI 框架
在 GTC 2022 年, NVIDIA 對 AI 框架進行了增強,以構建實時語音 AI 應用程序、大規模設計高性能推薦者、
4 MIN READ
GTC 推出新語言、增強網絡安全和醫療 AI 框架
2022年 9月 13日
使用 Vulkan SC 進行安全關鍵圖形和實時 GPU 處理
GPU 加速處理對于許多汽車和嵌入式系統至關重要。安全關鍵型和實時應用程序的要求和部署優先級與消費類應用程序不同,
1 MIN READ
使用 Vulkan SC 進行安全關鍵圖形和實時 GPU 處理
2022年 8月 31日
現已推出:帶有 DRIVE OS 6 的 NVIDIA DRIVE AGX Orin 開發人員套件
自動駕駛車輛開發商現在可以使用靈活、可擴展和高性能的硬件和軟件來構建下一代更安全、更高效的交通工具。
1 MIN READ
現已推出:帶有 DRIVE OS 6 的 NVIDIA DRIVE AGX Orin 開發人員套件
加載更多
人人超碰97caoporen国产
Search
Join
首頁
博客
論壇
論壇 (英文)
文檔
下載
培訓