<xmp id="om0om">
<td id="om0om"></td>
<table id="om0om"><noscript id="om0om"></noscript></table>
DEVELOPER
首頁
博客
論壇
論壇 (英文)
文檔
下載
培訓
Search
Join
3 月 19 日下午 2 點,鎖定 NVIDIA AI 網絡中文專場。
立即注冊觀看
DRIVE Sim
2023年 12月 18日
使用 Trajeglish 幫助自動駕駛汽車學習人類駕駛行為語言
駕駛員之間的溝通常常遠超于轉向燈和剎車燈的使用,很多情況下都依賴于人與人之間的交流,而并非汽車技術,比如,示意另一輛車繼續前行、
1 MIN READ
使用 Trajeglish 幫助自動駕駛汽車學習人類駕駛行為語言
2023年 12月 5日
使用自監督學習重建動態駕駛場景
從單調乏味的高速公路到日常的社區出行,駕駛通常都很平靜。因此,在現實世界中收集的大部分自動駕駛汽車 (AV)…
2 MIN READ
使用自監督學習重建動態駕駛場景
2023年 11月 28日
使用 Bi-Level 模仿學習仿真現實交通行為
無論是突然加塞(cut-in),還是無意地 U 形掉頭,人類駕駛員的行為通常難以預測。行為的不可預測性源自人類決策過程的天然復雜性…
1 MIN READ
使用 Bi-Level 模仿學習仿真現實交通行為
2023年 11月 13日
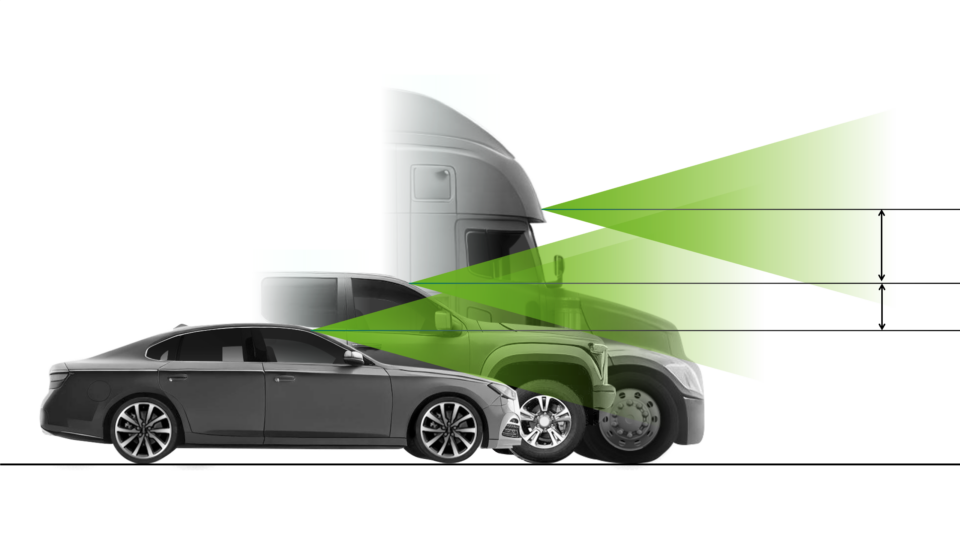
使用合成數據處理自動駕駛汽車感知
自動駕駛汽車 (AV) 有各種形狀和大小,從小型客車到多軸半掛卡車不等。但是,部署在這些車輛上的感知算法必須經過訓練,以處理類似情況,
2 MIN READ
使用合成數據處理自動駕駛汽車感知
2023年 9月 26日
驗證 NVIDIA DRIVE Sim 雷達模型
傳感器模擬是解決自動駕駛汽車(AV)開發中現實世界數據差距的關鍵工具。然而,只有傳感器模型準確地反映了物理世界,它才有效。
4 MIN READ
驗證 NVIDIA DRIVE Sim 雷達模型
2023年 7月 27日
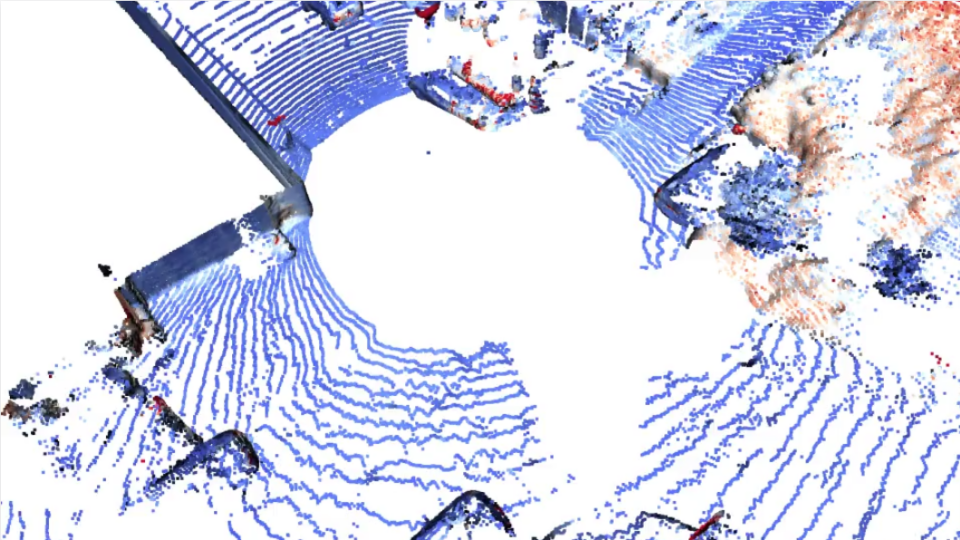
用神經激光雷達場感知自動駕駛汽車仿真的新前沿
自動駕駛汽車( AV )的開發需要大量的傳感器數據來進行感知開發。 開發人員通常從兩個來源獲得這些數據——真實世界驅動器的回放流或模擬。然而,
1 MIN READ
用神經激光雷達場感知自動駕駛汽車仿真的新前沿
2023年 5月 18日
利用合成數據聚焦遠場物體,實現基于攝像頭的 AV 感知
檢測遠場物體,如 100 米以外的車輛,是自動駕駛系統在高速公路上安全操作的基礎 在這樣的高速環境中,每一秒都很重要。因此,
2 MIN READ
利用合成數據聚焦遠場物體,實現基于攝像頭的 AV 感知
加載更多
人人超碰97caoporen国产
Search
Join
首頁
博客
論壇
論壇 (英文)
文檔
下載
培訓