<xmp id="om0om">
<td id="om0om"></td>
<table id="om0om"><noscript id="om0om"></noscript></table>
DEVELOPER
首頁
博客
論壇
論壇 (英文)
文檔
下載
培訓
Search
Join
3 月 19 日下午 2 點,鎖定 NVIDIA AI 網絡中文專場。
立即注冊觀看
Isaac ROS
2025年 1月 6日
利用最新的 NVIDIA Isaac 版本推進機器人學習、感知和操控技術
在 CES 2025 上,NVIDIA 宣布了對 NVIDIA Isaac 的重要更新。NVIDIA Isaac 是一個由加速庫、
3 MIN READ
利用最新的 NVIDIA Isaac 版本推進機器人學習、感知和操控技術
2024年 9月 23日
借助 ReMEmbR,生成式 AI 賦予機器人推理和行動能力
視覺語言模型 (VLM)通過將文本和圖像投影到同一嵌入空間,將基礎 LLM 的強大語言理解能力與 視覺 Transformer…
3 MIN READ
借助 ReMEmbR,生成式 AI 賦予機器人推理和行動能力
2024年 6月 2日
使用新的 NVIDIA Isaac 基礎模型和工作流程創建、設計和部署機器人應用
機器人在智能制造設施、商業廚房、醫院、倉庫物流和農業領域等不同環境中的應用正在迅速擴展。該行業正在向智能自動化轉變,
3 MIN READ
使用新的 NVIDIA Isaac 基礎模型和工作流程創建、設計和部署機器人應用
2024年 1月 22日
借助 NVIDIA Isaac Sim 在工作站上對攝像頭性能進行基準測試
機器人通常配備攝像頭。在設計數字孿生仿真時,在模擬環境中準確復制其性能非常重要。 但是,為了確保模擬平穩運行,必須檢查運行模擬的工作站的性能。
2 MIN READ
借助 NVIDIA Isaac Sim 在工作站上對攝像頭性能進行基準測試
2024年 1月 18日
使用 NVIDIA Isaac ROS 為深度物體姿態估計訓練生成合成數據
機器人智能體要與環境中的物體進行交互,必須了解周圍物體的位置和方向。此信息描述了 3D 空間中剛體的六自由度 (DOF) 姿態,
3 MIN READ
使用 NVIDIA Isaac ROS 為深度物體姿態估計訓練生成合成數據
2023年 12月 14日
使用 NVIDIA Isaac 模擬和本地化 Husky 機器人
由 Clearpath Robotics 開發的 Husky 機器人,是一款專為室內和室外研究用途設計的多功能四輪平臺。
3 MIN READ
使用 NVIDIA Isaac 模擬和本地化 Husky 機器人
2023年 11月 17日
使用適用于 ROS 的 NVIDIA Isaac Transport 提升自定義 ROS 圖形
適用于 ROS 的 NVIDIA Isaac Transport(NITROS)是在 ROS 2 Humble 中引入的兩種硬件加速功能…
4 MIN READ
使用適用于 ROS 的 NVIDIA Isaac Transport 提升自定義 ROS 圖形
2023年 10月 18日
借助 NVIDIA Isaac 平臺上的高級模擬和感知工具加速 AI 機器人開發
NVIDIA 于今日在 ROSCon 2023 發布了對 NVIDIA Isaac Robotics 平臺的重大更新。
2 MIN READ
借助 NVIDIA Isaac 平臺上的高級模擬和感知工具加速 AI 機器人開發
2023年 5月 29日
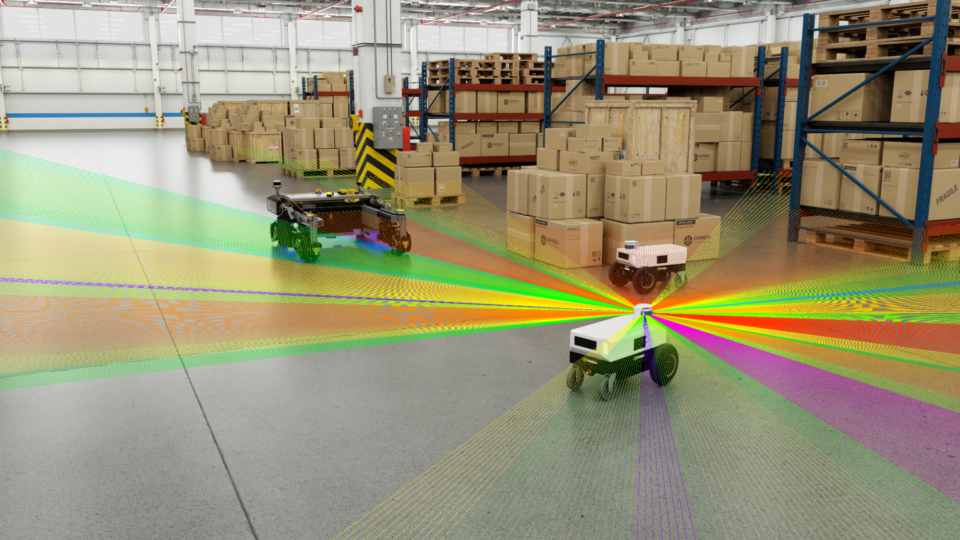
用 NVIDIA Isaac Sim 、 ROS 和 Nimbus 開發多機器人環境
隨著越來越多的自主機器人被部署在現實世界場景中,對高保真多機器人仿真環境的需求正在迅速增長。在這篇文章中,
3 MIN READ
用 NVIDIA Isaac Sim 、 ROS 和 Nimbus 開發多機器人環境
2023年 5月 24日
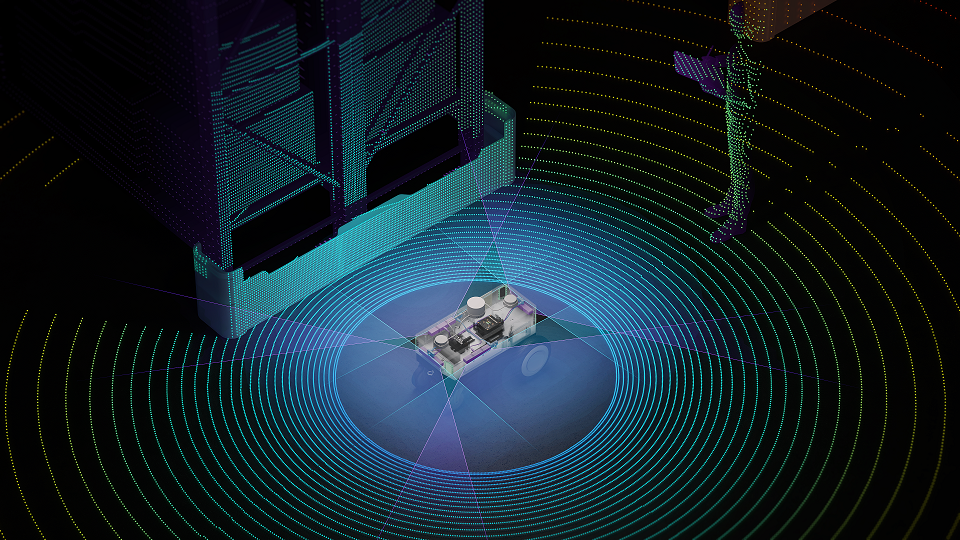
在 NVIDIA Jetson 上使用 Hardware-in-the-Loop 設計機器人
Hardware-in-the-Loop( HIL )測試是一種強大的工具,用于驗證復雜系統的性能,包括機器人和計算機視覺。
4 MIN READ
在 NVIDIA Jetson 上使用 Hardware-in-the-Loop 設計機器人
2023年 4月 18日
使用 NVIDIA Isaac ROS 開發人員預覽版 3 構建高性能機器人應用程序
機器人的復雜性正在增加,具有更高的自主性、更多的傳感器數量和多樣性,以及更多基于傳感器融合的算法。
2 MIN READ
使用 NVIDIA Isaac ROS 開發人員預覽版 3 構建高性能機器人應用程序
2023年 1月 3日
用 NVIDIA ISAAC Sim 2022.2 模擬未來智能機器人
NVIDIA 宣布推出 NVIDIA Isaac Sim 的 2022.2 版本 。作為機器人仿真和 合成數據 生成( SDG )工具,
2 MIN READ
用 NVIDIA ISAAC Sim 2022.2 模擬未來智能機器人
加載更多
人人超碰97caoporen国产
Search
Join
首頁
博客
論壇
論壇 (英文)
文檔
下載
培訓