OpenCL 正在改進與其他 API (如 Vulkan )的互操作方式。本文向您介紹了最新的 OpenCL 互操作風格,最新的 NVIDIA 驅動程序已經支持這種風格。我們提供了可下載的示例代碼,所以您今天可以嘗試這個新功能。
需要一種新的互操作方式
開發人員通常將 OpenCL for compute 與其他 API (如 OpenGL )一起使用,以訪問包括圖形渲染在內的功能。 OpenCL 長期以來一直支持通過擴展與 OpenGL 、 OpenGL ES 、 EGL 、 Direct3D 10 和 Direct3D 11 共享隱式緩沖區和圖像對象:
cl_khr_gl_sharingcl_khr_gl_eventcl_khr_egl_imagecl_khr_egl_eventcl_khr_d3d10_sharingcl_khr_d3d11_sharing
新一代 GPU API (如 Vulkan )使用對外部內存的顯式引用以及信號量來協調對共享資源的訪問。到目前為止,還沒有 OpenCL 擴展來支持外部內存和信號量與這類新的 API 共享。
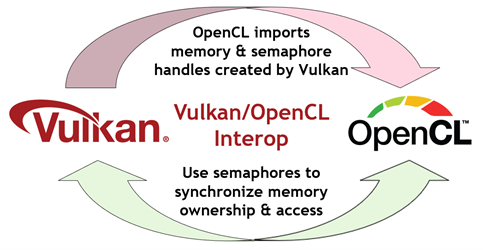
OpenCL 和 Vulkan 之間的互操作在移動和桌面平臺上都有很強的需求。 NVIDIA 與 Khronos OpenCL 工作組密切合作,發布了一套臨時跨供應商的 KHR 擴展。這些擴展使應用程序能夠在 OpenCL 和 Vulkan 等 API 之間高效地共享數據,與使用隱式資源的前一代互操作 API 相比,靈活性顯著提高。
這組新的外部內存和信號量共享擴展提供了一個通用框架,使 OpenCL 能夠使用 Vulkan 開發人員熟悉的方法導入外部 API 導出的外部內存和信號量句柄。然后, OpenCL 使用這些信號量來同步外部運行時,協調共享內存的使用。
然后可以添加特定于 API 的外部互操作擴展,以處理與特定 API 交互的細節。 Vulkan 互操作現在可用,并計劃使用其他 API ,如 DirectX 12 。
OpenCL 新的外部信號量和內存共享功能包括單獨的一組精心構造的擴展。
信號量擴展
這組擴展增加了從操作系統特定的信號量句柄創建 OpenCL 信號量對象的能力。
- cl_khr_semaphore – 表示帶有等待和信號的信號量。這是一個新的 OpenCL 對象類。
- cl_khr_external_semaphore – 使用導入和導出外部信號量的機制擴展
cl_khr_semaphore,類似于 VK_KHR_external_semaphore 。
以下擴展使用特定于句柄類型的行為擴展cl_khr_external_semaphore:
cl_khr_external_semaphore_opaque_fd– 使用帶有引用傳輸的 Linux fd 句柄共享外部信號量,類似于 VK_KHR_external_semaphore_fd 。cl_khr_external_semaphore_win32– 與 VK_KHR_external_semaphore_win32 類似,使用 win32 NT 和 KMT 句柄與引用轉移共享外部信號量。
內存擴展
這些擴展增加了從操作系統特定的內存句柄創建 OpenCL 內存對象的能力。它們的設計與 Vulkan 外部存儲器擴展 VK_KHR_external_memory . 類似
- cl_khr_external_memory – 從其他 API 導入外部內存。
以下擴展使用特定于句柄類型的行為擴展cl_khr_external_memory:
cl_khr_external_memory_opaque_fd– 使用 Linux fd 句柄共享外部內存,類似于 VK_KHR_external_memory_fd 。cl_khr_external_memory_win32– 使用 win32 NT 和 KMT 句柄共享外部內存,類似于 VK_KHR_external_memory_win32 。
使用 OpenCL
典型的互操作用例包括以下步驟。
檢查所需的支持是否可用:
- 檢查底層 OpenCL 平臺和帶有
clGetPlatformInfo和clGetDeviceInfo的設備是否支持所需的擴展cl_khr_external_semaphore和cl_khr_external_memory。 - 為了能夠使用 Win32 信號量和內存句柄,請檢查
cl_khr_external_semaphore_win32_khr和cl_khr_external_memory_win32_khr擴展是否存在。 - 為了能夠使用 FD 信號量和內存句柄,請檢查
cl_khr_external_semaphore_opaque_fd_khr和cl_khr_external_memory_opaque_fd_khr擴展是否存在。這也可以通過查詢支持的句柄類型來檢查。
導入外部信號量需要cl_khr_external_semaphore。如果支持cl_khr_external_semaphore_opaque_fd,則可以使用clCreateSemaphoreWithPropertiesKHR和 OpenCL 中的 FD 句柄導入 Vulkan 導出的外部信號量。
// Get cl_devices of the platform. clGetDeviceIDs(..., &devices, &deviceCount);// Create cl_context with just first device clCreateContext(..., 1, devices, ...);// Obtain fd/win32 or similar handle for external semaphore to be imported from the other API. int fd = getFdForExternalSemaphore();// Create clSema of type cl_semaphore_khr usable on the only available device assuming the semaphore was imported from the same device.cl_semaphore_properties_khr sema_props[] = {(cl_semaphore_properties_khr)CL_SEMAPHORE_TYPE_KHR, (cl_semaphore_properties_khr)CL_SEMAPHORE_TYPE_BINARY_KHR, (cl_semaphore_properties_khr)CL_SEMAPHORE_HANDLE_OPAQUE_FD_KHR, (cl_semaphore_properties_khr)fd, 0}; int errcode_ret = 0; cl_semaphore_khr clSema = clCreateSemaphoreWithPropertiesKHR(context, sema_props, &errcode_ret);
導入圖像需要cl_khr_external_memory和對圖像的支持。在 OpenCL 中,通過clCreateSemaphoreWithPropertiesKHR使用 Win32 句柄導入 Vulkan 導出的外部信號量。
// Get cl_devices of the platform. clGetDeviceIDs(..., &devices, &deviceCount);// Create cl_context with just first device clCreateContext(..., 1, devices, ...);// Obtain fd/win32 or similar handle for external semaphore to be imported from the other API. void *handle = getWin32HandleForExternalSemaphore();// Create clSema of type cl_semaphore_khr usable on the only available device assuming the semaphore was imported from the same device. cl_semaphore_properties_khr sema_props[] = {(cl_semaphore_properties_khr)CL_SEMAPHORE_TYPE_KHR, (cl_semaphore_properties_khr)CL_SEMAPHORE_TYPE_BINARY_KHR, (cl_semaphore_properties_khr)CL_SEMAPHORE_HANDLE_OPAQUE_WIN32_KHR, (cl_semaphore_properties_khr)handle, 0}; int errcode_ret = 0; cl_semaphore_khr clSema = clCreateSemaphoreWithPropertiesKHR(context, sema_props, &errcode_ret);
在 OpenCL 中,使用 FD 句柄將 Vulkan 導出的外部內存作為緩沖內存與clCreateBufferWithProperties一起導入。
// Get cl_devices of the platform.
clGetDeviceIDs(..., &devices, &deviceCount);
// Create cl_context with just first device
clCreateContext(..., 1, devices, ...);
// Obtain fd/win32 or similar handle for external memory to be imported from other API.
int fd = getFdForExternalMemory();
// Create extMemBuffer of type cl_mem from fd.
cl_mem_properties_khr extMemProperties[] =
{ (cl_mem_properties_khr)CL_EXTERNAL_MEMORY_HANDLE_OPAQUE_FD_KHR,
(cl_mem_properties_khr)fd,
0
};
cl_mem extMemBuffer = clCreateBufferWithProperties(/*context*/ clContext,
/*properties*/ extMemProperties,
/*flags*/ 0,
/*size*/ size,
/*host_ptr*/ NULL,
/*errcode_ret*/ &errcode_ret);在 OpenCL 中,使用clCreateImageWithProperties將 Vulkan 導出的外部內存作為圖像內存導入。
// Create img of type cl_mem. Obtain fd/win32 or similar handle for external memory to be imported from other API. int fd = getFdForExternalMemory();// Set cl_image_format based on external image info cl_image_format clImgFormat = { }; clImageFormat.image_channel_order = CL_RGBA; clImageFormat.image_channel_data_type = CL_UNORM_INT8;// Set cl_image_desc based on external image info size_t clImageFormatSize; cl_image_desc image_desc = { }; image_desc.image_type = CL_MEM_OBJECT_IMAGE2D_ARRAY; image_desc.image_width = width; image_desc.image_height = height; image_desc.image_depth = depth; cl_mem_properties_khr extMemProperties[] = { (cl_mem_properties_khr)CL_EXTERNAL_MEMORY_HANDLE_OPAQUE_FD_KHR, (cl_mem_properties_khr)fd, 0 };cl_mem img = clCreateImageWithProperties(/*context*/ clContext, /*properties*/ extMemProperties, /*flags*/ 0, /*image_format*/ &clImgFormat, /*image_desc*/ &image_desc, /*errcode_ret*/ &errcode_ret)
使用信號量 wait 和 signal 在 OpenCL 和 Vulkan 之間同步。
// Create clSema using one of the above examples of external semaphore creation. int errcode_ret = 0; cl_semaphore_khr clSema = clCreateSemaphoreWithPropertiesKHR(context, sema_props, &errcode_ret); while (true) { // (not shown) Signal the semaphore from the other API,// Wait for the semaphore in OpenCL clEnqueueWaitSemaphoresKHR( /*command_queue*/ command_queue, /*num_sema_objects*/ 1, /*sema_objects*/ &clSema, /*num_events_in_wait_list*/ 0, /*event_wait_list*/ NULL, /*event*/ NULL); clEnqueueNDRangeKernel(command_queue, ...); clEnqueueSignalSemaphoresKHR(/*command_queue*/ command_queue, /*num_sema_objects*/ 1, /*sema_objects*/ &clSema, /*num_events_in_wait_list*/ 0, /*event_wait_list*/ NULL, /*event*/ NULL); // (not shown) Launch work in the other API that waits on 'clSema'
今天就試試吧!
您可以使用可下載的 sample code 以及 NVIDIA R510 (或更高版本)驅動程序,嘗試新的 NVIDIA OpenCL 實現 Vulkan 互操作:
有關更多信息,請參閱 Khronos 發布了用于神經網絡推理和 OpenCL / Vulkan 互操作的 OpenCL 3.0 擴展 .
?