自動駕駛汽車的發展與規模有關。工程師必須收集并標記大量數據,以訓練自動駕駛神經網絡。
然后,這些數據被用于測試和驗證 AV 系統,這也是確保魯棒性的一項巨大任務。仿真是達到這一規模的重要工具,但準確性是其有效性的關鍵。
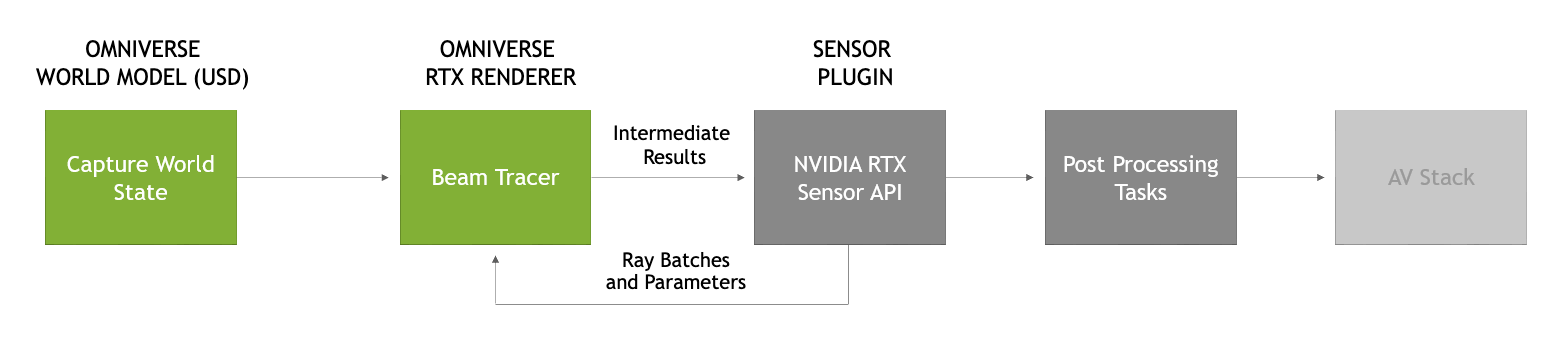
NVIDIA DRIVE Sim 建立在 NVIDIA Omniverse 的基礎上,通過基于物理的端到端仿真平臺解決了這一挑戰,該平臺從一開始就構建為運行大規模、物理精確的多傳感器仿真。它使您能夠生成合成數據,以訓練 AV 感知,并在具有高保真度和精確傳感器數據的閉環模擬中驗證運動控制。
AV 傳感器可分類如下:
- 被動: 攝像機
- 主動: 激光雷達、雷達和超聲波
這種驗證我們的模型與現實相符的能力確保了 DRIVE Sim 產生值得信賴的結果。現在,我們將分享我們為將激光雷達模型與現實世界相關聯所做的工作。在 Lidar Validation 白皮書中,我們介紹了用于驗證 DRIVE Sim 激光雷達模型的準確性和精度的過程。
在 NVIDIA ,我們探索了多種方法來實現傳感器驗證,例如比較基于真實數據訓練的神經網絡和基于合成數據訓練的網絡。此外,我們通過將合成數據本身與傳感器的規格和真實世界的實驗進行比較來驗證傳感器的準確性。
閱讀 Lidar Validation 白皮書,這是關于模擬中傳感器驗證的系列文章中的第二篇,并趕上上一篇文章 camera sensor validation 。
?