- Welcome
- Getting Started With the NVIDIA DriveWorks SDK
- Modules
- Samples
- Tools
- Tutorials
- SDK Porting Guide
- DriveWorks API
- More



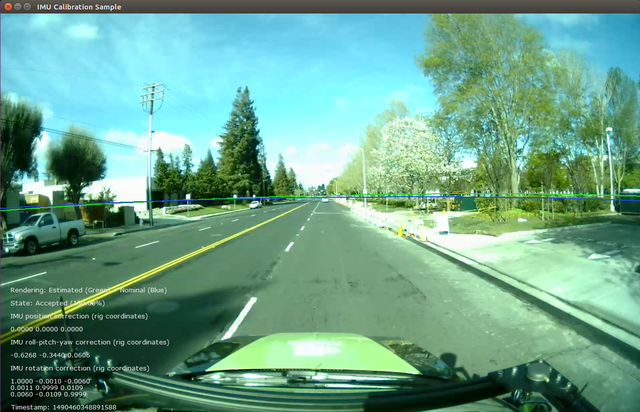
This sample demonstrates estimating IMU extrinsics with the NVIDIA® DriveWorks Calibration Engine.
The IMU calibration sample, sample_calibration_imu, accepts the following optional parameters. If none are specified, the IMU extrinsics are estimated on a default dataset.
./sample_calibration_imu --rig=[path/to/rig/configuration/file]
--imu-sensor=[integer/sensor-name]
--can-sensor=[integer/sensor-name]
--camera-sensor=[integer/sensor-name]
where
--rig=[path/to/rig/configuration/file]
Path to the rig configuration file.
Default value: path/to/data/samples/recordings/suburb0/imu_offset_rig.json
--imu-sensor=[integer]
The index or name of the IMU sensor in the rig configuration file to calibrate
Default value: 0
--can-sensor=[integer]
The index or name of the CAN sensor in the rig configuration file
Default value: 0
--camera-sensor=[integer]
The index or name of the camera sensor in the rig configuration file (used for visualization only)
Default value: 0
The sample does the following:
After convergence, the sample runs the sample data in a loop, during which the calibration is further refined.
For more information on IMU calibration, see IMU Self-Calibration .