- Welcome
- Getting Started With the NVIDIA DriveWorks SDK
- Modules
- Samples
- Tools
- Tutorials
- SDK Porting Guide
- DriveWorks API
- More



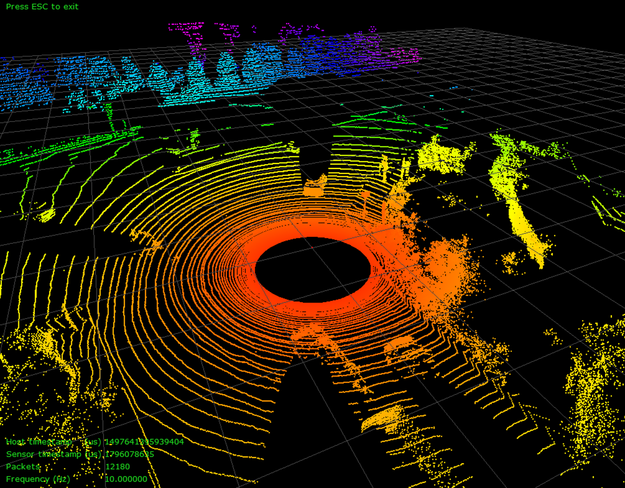
The Lidar Replay sample demonstrates how to connect to a Lidar and visualize the generated point cloud in 3D.
The Lidar Replay sample, sample_lidar_replay, accepts the following parameters:
./sample_lidar_replay --protocol=[lidar.virtual|lidar.socket|lidar.custom]
--params=[comma/separated/key/value/pairs]
--show-intensity=[true|false]
Where:
--protocol=[lidar.virtual|lidar.socket|lidar.custom]
Specifies which Lidar driver to use.
- `lidar.virtual`: replays from file.
- `lidar.socket`: live Lidar replay.
- `lidar.custom` is used for custom full sensor plugin based lidars
Default value: lidar.virtual
--params=[comma/separated/key/value/pairs]
Different parameters are available for each Lidar driver.
Default value: file=path/to/data/samples/sensors/lidar/lidar_velodyne_64.bin
--show-intensity=[true|false]
Enables an alternative HUE based rendering mode, which renders intensity
proportional to wavelength. Higher intensities are in blue, while lower intensities are in red.
In default mode, color is rendered by 2D distance from the origin where red is near and blue is far.
Default value: false
During runtime, the following sample interactions are available:
./sample_lidar_replay --protocol=[lidar protocol] --params=device=[type of device],ip=[lidar IP address],dip=[IP address of UDP packet receiver],port=[lidar port],hres=[valid horizontal resolution],return-mode=[valid return mode],scan-frequency=[valid frequency] (--show-intensity=[true])
./sample_lidar_replay --protocol=lidar.virtual --params=file=[lidar file] (--show-intensity=[true])
./sample_lidar_replay --protocol=lidar.custom --params=decoder-path=<path_to_so>[,<custom params>]
The sample opens a window to display a 3D point cloud.
For more details see Lidar.
In case of packet drops see Increase Packet Queue Size.