- Welcome
- Getting Started With the NVIDIA DriveWorks SDK
- Modules
- Samples
- Tools
- Tutorials
- SDK Porting Guide
- DriveWorks API
- More



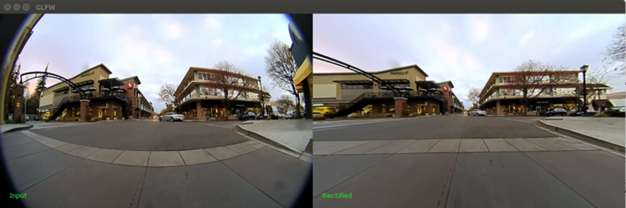
The Video Rectification sample demonstrates how to remove fisheye distortion from a video captured on a camera with a fisheeye lens.
The sample reads frames from a video input recorded from an 180 fov camera and takes the calibration from the rig.json file. It then performs rectification and displays both the original and rectified video side-by-side.
./sample_video_rectifier --video=[path/to/video]
--rig=[path/to/rig/file]
--camera-name=[string]
--fovX=[integer]
--fovY=[integer]
--record-video=[h264|h265|mp4]
where
--video=[path/to/video]
Points to a recorded video.
Default value: .././data/samples/sfm/triangulation/video_0.h264
--rig=[path/to/rig/file]
Points to the rig file that contains calibration information.
Default value: .././data/samples/sfm/triangulation/rig.json
--camera-name=[string]
Is the camera name in the rig configuration file.
Default value: SVIEW_FR
--fovX=[integer]
Defines the field of view of the camera along the X axis.
This property is only applicable to pinhole cameras.
Default value: 120
--fovY=[integer]
Defines the field of view of the camera along the Y axis.
This property is only applicable to pinhole cameras.
Default value: 90
--record-video=[h264|h265|mp4]
Records the rectified output to a specified video type.
Default value: N/A
It is possible to apply a basic homography transformation in the form of translations to the input camera. By using LEFT/RIGHT the camera moves left and right, UP/DOWN moves forwards and backwards and U/J moves up and down. The resulting homopgraphy is applied along with the undistortion and is visible in the output image.
./sample_video_rectifier --video=<video file.h264> --rig=<rig.json>
./sample_video_rectifier --fovX=90 --fovY=30
The sample creates a window and displays the original video and the rectified version.
For more details see Rectifier .