NVIDIA Isaac GR00T
Generalist Robot 00 Technology
NVIDIA Isaac? GR00T is a research initiative and development platform for developing general-purpose robot foundation models and data pipelines to accelerate humanoid robotics research and development.
Download Isaac GR00T N1 ModelExperience the Synthetic Data Blueprint
See GR00T in Action
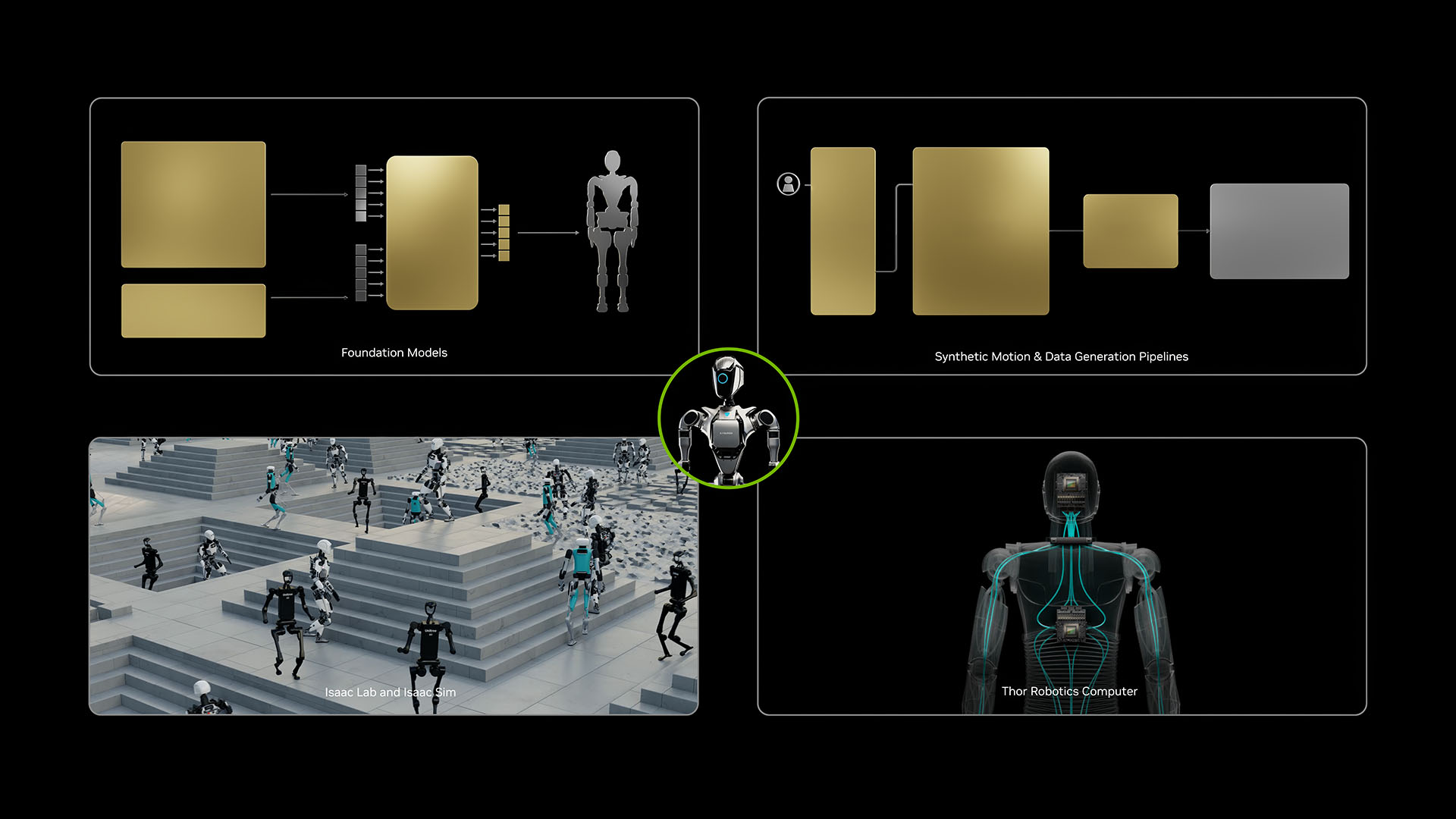
How GR00T Works
Isaac GR00T features robot foundation models for cognition and control, simulation frameworks built on NVIDIA Omniverse? and Cosmos?, data pipelines for generating synthetic data and environments, and a computer in the robot—Jetson AGX Thor?—to run the entire robot stack.
Introductory Video
Watch how GR00T helps provide the building blocks for the future of AI-powered robotics.
Introductory Blog
Explore the world’s first open foundation model for generalized humanoid robot reasoning and skills.
Introductory Session
Learn about the pillars of GR00T — a platform for developing humanoid robots.
Build a Synthetic Motion Generation Pipeline
Fast-track humanoid motion policy learning through synthetically generated motion data.
Isaac GR00T N1 Robot Foundation Model
NVIDIA Isaac GR00T N1 is the world’s first open foundation model for generalized humanoid robot reasoning and skills. This cross-embodiment model takes multimodal input, including language and images, to perform manipulation tasks in diverse environments.
GR00T N1 was trained on an expansive humanoid dataset, consisting of real captured data, synthetic data generated using the components of the NVIDIA Isaac GR00T Blueprint and internet-scale video data. It is adaptable through post-training for specific embodiments, tasks and environments.
GR00T N1 can easily generalize across common tasks — such as grasping, moving objects with one or both arms, and transferring items from one arm to another — or perform multi-step tasks that require long context and combinations of general skills. These capabilities can be applied across several use-cases, including material handling, packaging, and inspection.

Isaac GR00T N1 2B Model
Download from Hugging FaceGR00T Workflows
Accelerate the development of advanced capabilities for humanoid robots and bridge the simulation-to-reality gap with GR00T workflows.

GR00T-Teleop
Collect high-quality human demonstrations via teleoperation.
GR00T-Mimic
Generate a large number of synthetic motion trajectories from a small number of human demonstrations.
GR00T-Gen
Teach robots to generalize and adapt to new situations using diverse, realistic simulation environments.
GR00T-Dexterity
Simplify the complex grasping tasks with an end-to-end, pixels- to- action grasping system to have human-like dexterity.
GR00T-Mobility
Enhance the robot’s ability to adapt to new, unseen environments using reinforcement learning and imitation learning techniques.
GR00T-Control
Achieve responsive and precise humanoid robot control with a suite of whole- body control libraries, models, and policies.
GR00T-Perception
Integrate vision language models, LLMs, and retrieval-augmented memory to boost perception, cognition, and adaptability.
Get Started Developing Humanoid Robots
Advance your humanoid robot development with GR00T foundational technologies by accessing tutorials, forums, release notes, and comprehensive documentation.
Software and Services
Data Generation Pipelines
Generate large synthetic trajectory data sets from just a few human demonstrations with GR00T-Mimic and Cosmos. Then, train your robot motion policy model in Isaac Lab.
Train Robot Policies
NVIDIA Isaac Lab enables scalable, adaptable policy training in physically accurate scenes, bridging the sim-to-real gap.
Simulate and Validate
The trained robot policies can be validated in physically accurate environments using NVIDIA Isaac Sim? before deployment.
Learn More About Isaac SimCompute Infrastructure
Train
The NVIDIA DGX? Cloud end-to-end AI platform for training robotics foundation models gives you scalable capacity built on the latest NVIDIA architecture. It’s co-engineered with the world’s leading cloud service providers.
Simulate
NVIDIA Ominiverse and Cosmos systems deliver the simulation platforms on industry-leading NVIDIA OVX? systems. This lets you accelerate the next generation of robotics simulation workloads in the data center.
Get OVXDeploy
Accelerate the development of advanced humanoid robots and run multimodal AI models. Jetson AGX Thor is based on NVIDIA Blackwell architecture and comes with integrated functional safety, high-performance CPU, and 100 GB of ethernet bandwidth.
Humanoid Developer Learning Library
Humanoid Robotics Ecosystem
NVIDIA builds foundation models, acceleration libraries and blueprints to accelerate the world’s ecosystem of humanoid developers. Explore our humanoid ecosystem.






