- Welcome
- Getting Started With the NVIDIA DriveWorks SDK
- Modules
- Samples
- Tools
- Tutorials
- SDK Porting Guide
- DriveWorks API
- More



The Radar Replay sample demonstrates how to connect to a Radar and display the generated point cloud in 3D. For a list of currently supported Radar devices, see the Release Notes.
On Linux execute:
ARS430 Radar: sudo ifconfig eth0:900 10.1.0.81 || true sudo route add -net 224.0.0.0 netmask 240.0.0.0 dev eth0:900 || true sudo route add -net 10.1.0.0 netmask 255.255.0.0 dev eth0:900 || true
ARS430 RDI Radar: sudo ifconfig eth0:900 192.168.3.81 || true sudo route add -net 224.0.0.0 netmask 240.0.0.0 dev eth0:900 || true sudo route add -net 192.168.3.0 netmask 255.255.255.0 dev eth0:900 || true
The Radar Replay sample, sample_radar_replay, accepts the following parameters:
./sample_radar_replay --protocol=[radar.virtual|radar.socket|radar.custom]
--params=[comma/separated/key/value/pairs]
--profiling=[0|1]
Where:
--protocol=[radar.virtual|radar.socket|radar.custom]
Allows to specify which Radar driver to use.
radar.virtual is used for recorded file
radar.socket is used for live IP based radars and custom decoder plugin based radars
radar.custom is used for custom full sensor plugin based radars
Default value: radar.virtual
--params=[comma/separated/key/value/pairs]
Different parameters are available for each Radar driver.
Default value: file=path/to/data/samples/sensors/radar/conti/radar_0.bin
--profiling=[0|1]
When set to 1, enables sample profiling.
Otherwise, profiling is disabled.
Default value: 1
The following interactions with the sample are available at runtime:
./sample_radar_replay --protocol=radar.socket --params=device=[type of device],ip=[radar IP address],port=[radar port]
Where [type of device] is one of the following:
multicast-ip=239.0.0.1 is required../sample_radar_replay --params=file=[radar bin file]
./sample_radar_replay --protocol=radar.custom --params=decoder-path=<path_to_so>[,<custom params>]
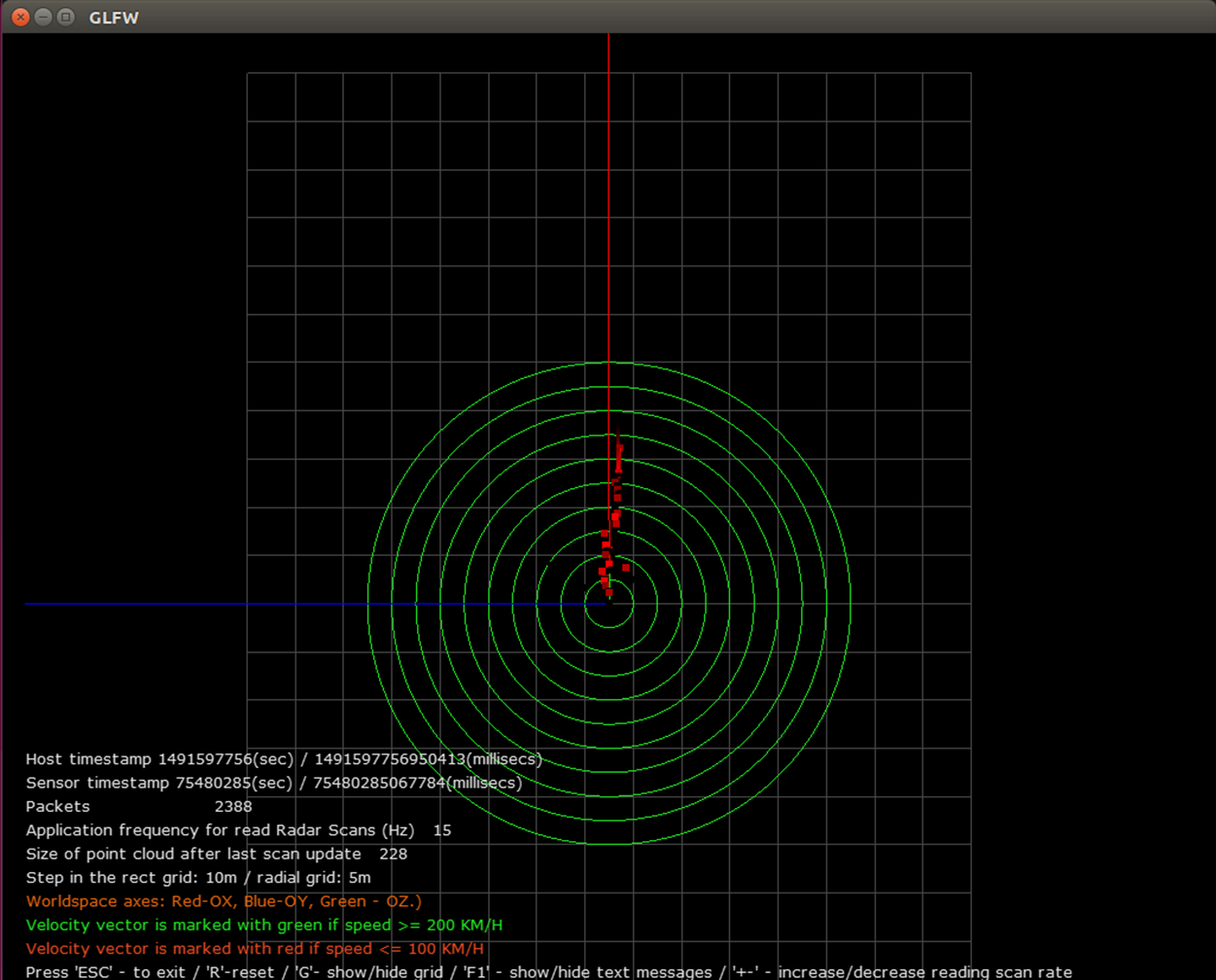
The sample opens a window to display a 3D point cloud. The output contains directed unit velocity vectors, other than the points displayed. If the velocity is 100 km/h or less, the directed vectors are red. If it is 200 km/h or more, they are green.
Worldspace axes:
For more details see Radar.